| Thread Tools |
| This thread is privately moderated by Jack Crossfire, who may elect to delete unwanted replies. |
|
|
|
|
Thread OP
|
Discussion
XV-11 lidar part 2
In true silicon valley H1B worker fashion, the TX & RX labels were reversed. TX on a device normally means signal going out of the device, but the sensor has it meaning signal going into the device.
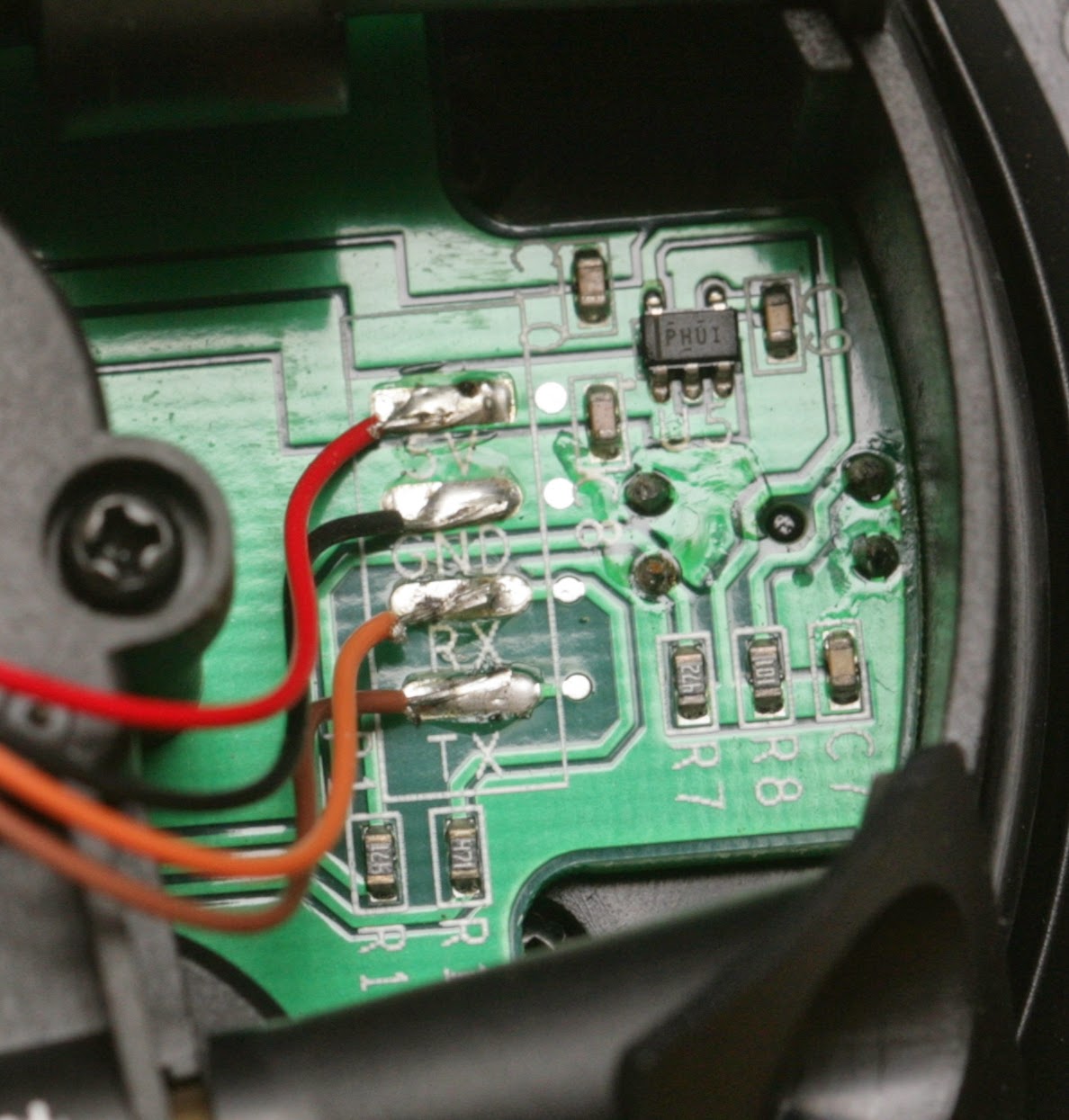 After a day of getting only error codes from the XV-11, the problem narrowed down to the rotation sensor. Then it became clear that it needed a very very specific signal from its rotation sensor. Lacking any meanings for the error codes, the key was reading the rotation rate encoded in the packets. The internet claimed a very narrow range of 180-360 rpm being required. There was no way it could do more than 6 scans per second. 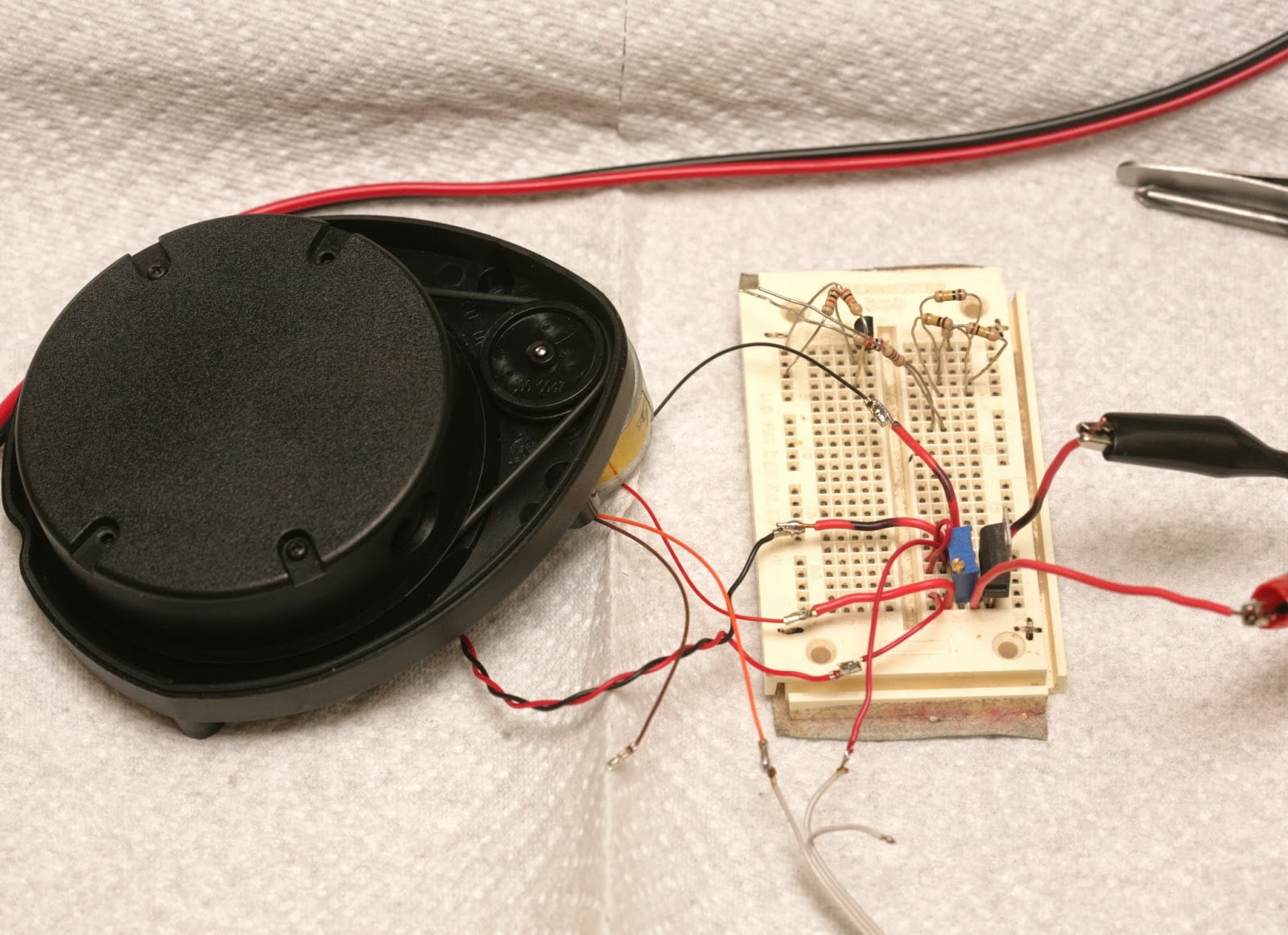 Even with a stock sensor that still spins, with the RPM perfectly dialed in, most of the readings were error codes. The stock motor needed to be down to 2.8V before it was slow enough. Then, there was routing the stock rotation sensor through the TX pin to capture it.  That revealed the exact direction of rotation & azimuth code, 14 pulses of 50% duty cycle & 1 pulse of 25% duty cycle. The 25% pulse needs to come after a 75% delay. It doesn't work if the pulse comes before the 75% delay. There definitely wasn't any margin in the software for any anomalies.     A crusty webcam reveals the IR laser. It would be bad to look at it, when it's not spinning. It's actually correlated to the rotation speed. It doesn't turn on if there's no rotation. It's very faint if the RPM is too high or too low. It's only fully on inside the narrow RPM range. So using it as horizontal range finder is a dangerous application of something that's safe in its normal application. There is a description of the laser on http://random-workshop.blogspot.com/...-analysis.html which for some reason he wrote on a paper notebook & photographed, like a college chemistry class. Whatever gets you a job.  RPM out of range  RPM in range |
|
|
Last edited by Jack Crossfire; Mar 09, 2014 at 01:11 AM.
|
|
|
|

