|
|
|
|
Thread OP
|
Discussion
New Quadrocopter and Tricopter UAVP updated with GPS and more - UAVX!
Some History
The public release of UAVP V3.05 by Dr Wolfgang Mahringer was 15 March 2007 and as such was one of the first. UAVXPIC was based on UAVP V3.15 running on the Black Board with the PIC876. The PIC876 processor was replaced by the PIC2520 but both are now like the dinosaurs. Nonetheless they still flew well with a 200Hz main loop, discrete gyros and accelerometers on the bigger frames. The originating thread from which this thread is derived is: https://www.rcgroups.com/forums/showthread.php?t=811550The UAVXArm prototype first ran on Arm around December 2008 and was released based on STMF407 in August 2009. The F1 Arm which was in wide use later, by others, was always a dead end. There was lots of activity back them including Mikrokopter also with pretty much all of the Navigation and other functionality that we expect now but a decade ago  . The big change was the Racers but then again Warthox was showing the way a long long way back. . The big change was the Racers but then again Warthox was showing the way a long long way back. UAVXArm The UAVXArm32F4 V4 board is now available to order from Ken at QuadroUFO. The V4 uses the:
The V4, at this date, is probably the smallest full-house F4 board out there and has been flown on regular 600 scale hexacopters down to nano quads. In the latter case a daughter board also available from QuadroUFO provides1/2S support for up to 6 brushed motors. While designed for UAVX the V4 board is a simple porting target for other flight codes (Cleanflight et al., AutoQuad etc.) which have now adopted, or support, the same sensor package. MultiWii 2.3 was ported and flown. Google has withdrawn support for project code uploads so monitor gitHub for firmware updates. Always archive your known working versions . UAVX Functionality UAVX continues to support the functions and failsafe features it has had for almost a decade including return to home and waypoint navigation. Recent additions include:
Startup Documentation The startup document should get you in the air. All electrically powered devices are potentially dangerous so pay particular attention to notes on safety. Detailed information, much of which was produced by Jim aka Jesolins, may be found in the following post. The Wikis, partially recovered from the now dead Google Projects are now on gitHub . The original uavp-mods wikis are also in the gitHub archive. Release Date UAVX was first released 15th August 2009 Australian EST. Caveat: We do this for FUN not money and entirely in our own free time so we are permanently in Beta Test. Choosing to be involved in this "testing" is entirely at your own risk. We welcome constructive considered comments on how we can improve UAVX as part an overall community effort which this and other RCG threads are intended to be. Acknowledgment & Disclaimer: We wish to acknowledge the pioneering work of Dr Wolfgang Mahringer the author of UAVP. Any and all use of material on this thread including in particular the use of UAVX and its support software is entirely at your own risk - see the GNU Licence provisions. |
|
|
Last edited by gke; Nov 11, 2020 at 04:44 PM.
|
|
|
|
|
|
|
|
...
 ... ...Testing of the new hardware and firmware UAVXARM32F4 is complete as of September 2212. See www.quadroufo.com for purchasing the latest 32 bit Arm UAVX flight controller. *Attention July 2015: Please see Github UAVXArm for the latest builds and the newest UAVXArm flight controller information! Please see our Google downloads area and WIKI for archived information. Google plans on phasing out Google code so until then archived data will remain until transfered to Github UAVXArm. Note: I have distinguished the notes below between the older UAVXPIC and newest UAVXArm32F4 info for archive purposes. The latest info will be signified as UAVXArm32F4. Some of the data is universal and still applies. <Start UAVXPIC archived data> A significantly new UAVX firmware v2, and UAVPset was released 20 June 2011. Change info from Prof Egan here: https://www.rcgroups.com/forums/showpost.php?p=18544910&postcount=7179Use the UAVX v2 firmware with the UAVPset v6.xx and UAVXGS v1.xx and UAVXNav v1.xx. It now has enough flight time on it to be called Beta, 10/28/2011. The Current update release is: 21 June 2012 UAVX v2.1993 Beta and is for 40Mhz UAVX flight controllers fitted with a 10Mhz crystal only! CAUTION!: If you accidentally load this on a flight controller with the original 16Mhz crystal, it will require a PIC programmer to reload the proper 16Mhz firmware. Therefore we strongly suggest that you replace the original 16Mhz crystal with a 10Mhz crystal which will allow the use of the higher performance 40Mhz UAVX firmware. See further instructions on how to upgrade in the next paragraph.. Use the latest published at the top ot the downloads lisitings for UAVPSet 7.4, UAVXGS 1.15 and UAVXNav 1.5. LOAD THE DEFAULT PARAMETERS AND THEN ADD YOUR CHANGES. Use version with I2C100KHz in the filename for the original HMC6352 compass. Use the other firmware for the now preferred HMC5883L 3-axis magnometer which allows for a faster 500Khz I2c rate. We are recommending that everyone migrate to the UAVX 40Mhz firmware for better ESC update rate performance. The UAVX 16Mhz firmware is now frozen at UAVX-V2.1853gke-18F2620 Beta FINAL 16MHZ VERSION 20120207. Development is continuing in the UAVX 40Mhz firmware. WE suggest that you upgrade the 50 cent 10Mhz crystal to take advantage of improved flight performance. Note that you must use a programmer to do the first 40Mhz 18F2620 PIC firmware load or buy a pre-loaded chip from www.quadroufo.com. The 16Mhz crystal on the FCB must be replaced with a 10Mhz crystal. See our WIKI for 40Mhz info: http://code.google.com/p/uavp-mods/wiki/40MhzFirmware CAUTION: 7 August 2011 firmware and upwards: Changes to I2C ESC motor assignments to be consistent with PWM ESCS. Updated UAVXGS 1.12 uploaded with motor display consistent with I2C modification. Also the Nav sensitivity reduction was removed. Log files show previous sensitivity range was too small. Some PID Tuning will be needed. UAVX v1.1638b Beta released 7 August 2011 and requires UAVPset v4.17 upwards. CAUTION if you are using I2C ESCs. A revised V1 Beta with I2C ESC motor assignment the same as for PWM ESCs has been uploaded. UAVXGS motor tagging may be incorrect for V1 UAVX but this is not a big deal. JR DM9 & AR7000 channel assignment should also be fixed. The companion UAVX Ground Station application is v1.9 The other posted Alpha builds have limited flight time on them and are for the brave who wish to help finalize testing for the beta releases: http://code.google.com/p/uavp-mods/downloads/list New features: VTcopter (v-tail), hexa PWM. Altitude hold disabled by setting GPS POTI below 10%. GPS disabled when ch 7 is below 20%. Point of focus. Auto land altitude detection using a ultrasonic detector, waypoints with UAVXNAV station and a UAVX ground station for telemetry. New falisafe features added for non-GPS flyers. Read the Failsafe document in the WIKI: http://code.google.com/p/uavp-mods/wiki/UAVXFailsafe Hand test before flight! Fly safe! <End UAVXPIC archived data> UAVX Features: --True open source. All developers and ideas welcome! Noob friendly thread! Code of conduct mandates 2-way patience and respect for all participants in the thread. The folks who come here and develop and contribute to this fine quad/tricopter open source project are doing so in their spare time. --Has all the original UAVP features: I2c or standard off-the-shelf ESCs, compass, barometer for altitude hold, tricopter firmware using traditional servo tail for yaw. --UAVX added features: better flight stability, better baro altitude hold, GPS position hold and return to home, auto-land, one firmware for most Tx/Rx's using pull-down menus in the UAVPset(v1.xx), Configuable channel order in UAVPset(v2.xx), parameter options selected by Tx stick inputs. Quad, Octo, Hexa +/X orientations, V-Tail, Tricopter, Heli and Aircraft configuations. --UAVX optional features: UAVXNav application for waypoint navigation, UAVXGS for groundstation (both now available in our downloads area), UAVPset pull down telemetry options, ground sensing auto-landing motor cut-off vs timing, ultra sonic altitude calibration using Maxbotix XL-EZ3, polar coordinate steering, point of focus for AVP. --For older UAVXPIC version: Increase 18F PIC speed from 16hz to 40hz using 40Hz firmware and removing 16hz crystal and replacing it with a 10Hz crystal(recommended). --New 32bit processor UAVXArm32F4 Flight Controller released December 2012: STM32F405RG6 with FPU 168MHz (1024Kb Flash/32Kb RAM) List of Parts for UAVXArm32F4: *available from Ken in California www.quadroufo.com 1.UAVXArm32F4 flight controller board ~$96.50 plus shipping.: Includes 3-axis gyro, 3-axis accelerometer, 3-axis magnometer, MS5611 barometer, USB FTDI and a mini USB Cable. Board Size: 54mm X 51mm. Optional items: sonar sensor, GPS. Also available for ~$53.50 plus shipping is a senosrless UAVXArm32F4 which can be used standalone or as an adapter on the "Legacy" UAVP board making use of its sensors including the analog gyros which are still hard to beat List of Parts for UAVXPIC: *available from Ken in California www.quadroufo.com 1. UAVP flight control board: Includes 3-axis gyro, 3-axis accelerometer, 1 compass: *$313-$405: http://www.quadroufo.com/index.php?c...56ce30abb335f1 For the Pull down menu selections use 3.3v mod-yes, Firmware type-Normal, Receiver type-PPM, Speed Controller type PWM(Normal) Choices of the cheaper LY530LYH gyros at $18.50 ea, ADXRS300 gyros at $50.50 each and MLX90609-R2(no longer available) at $50 each. http://www.quadroufo.com/index.php?c...qchvkl0dm11v04 2. 18F2620 PIC *$14.50: http://www.quadroufo.com/product_inf...56ce30abb335f1 For the pull down menu select gke-normal for a quad setup with a 7 or more channel Rx. For a 6ch Tx/Rx select gke 6ch-normal. If you want to build a tricopter, select gke-normal for 7 channel or more Tx/Rx. For a 6ch T/Rx select gke-6ch-tri-normal. These firmware can be changed and or updated by the user using a programmer cable. 3. Optional: Barometer: BMP085-*$28(recommended due to more precision) or the original SMD500: http://www.quadroufo.com/product_inf...56ce30abb335f1 4. *ESC's: Standard such as Towerpro, HK Super Simple, Turnigy Plush, Mystery, RCTimer; amp rating as needed. Get one extra as a spare! Can also use I2c ESCs if desired. For most motors this 30A ESC at Quadroufo will work fine: http://www.quadroufo.com/index.php?c...56ce30abb335f1 5. *Brushless motors. Sized as needed. Get one extra as a spare! A good selection here: http://www.quadroufo.com/index.php?c...56ce30abb335f1 Also see the Quadrocopter and Tricopter Mega Link Index under motors for suggestions 6. Props. Be sure to get spares! For quads over 1kg use APC1047 and the BL28-30-14 or KA20-22L motors. For quads under 1kg EPP1045 and any of the motors listed above. Props available here: http://www.quadroufo.com/index.php?c...56ce30abb335f1 7. Frame. See the Quadrocopter and Tricopter Mega Link Index Recommendation: Rusty's frame for ease of maintenance and reasonable cost: http://aglhobbiesllc.com/shop/ 8. Buzzer. This one is really loud so you can hear it a quite a distance: http://www.quadroufo.com/product_inf...56ce30abb335f1 9. Tx and Rx. 7 channels minimum recommended for GPS, but can work with 6. Basic flight only needs 4 channels. 10. Lipos and charger. Typically 2000-5000mah depending on AUW and motor requirements. 11. Serial or USB FTDI programming cable for the UAVP board. For BIY see the UAVP manual: http://uavp.ch/moin/Documentation?ac...o+V3_14+EN.pdf Suggestion for com port adapter: USB to Serial adapter based on Prolific chipset: http://cgi.ebay.com/USB-2-0-RS232-SE...ht_6594wt_1166 PC Com port setup info: https://www.rcgroups.com/forums/show...postcount=4978 12. Optional: GPS-$38 http://www.quadroufo.com/product_inf...56ce30abb335f1 and DPDT switch ~$4 https://www.rcgroups.com/forums/show...9#post13610629 and https://www.rcgroups.com/forums/show...9#post13618351 Suggested backup battery: http://search.digikey.com/scripts/Dk...3247&k=P296-ND or http://search.digikey.com/scripts/Dk...words=SY103-ND 13. Optional: Ultrasonic range finder sensor for smoother auto landing. Good from ground to ~20ft, ~$50: Maxbotix XL-EZ3 http://www.sparkfun.com/commerce/pro...oducts_id=9494 Info Links: --Safety!!! Quad safety 101 --Flight Checklist --Flight simulator and multicopter models for FMS --The original UAVP manual is in need of updating for some things such as the 3.3v mod, but is still a good place to get build and board testing info: http://uavp.ch/moin/Documentation?ac...o+V3_14+EN.pdf Keep in mind that we recommend the front and rear props are mounted as CCW and left and right as CW. This is required for the default parameters loading using the UAVPset Tesfirmware "Shift D" function to work! Check our Google Code WIKI for more specific build info: http://code.google.com/p/uavp-mods/w/list 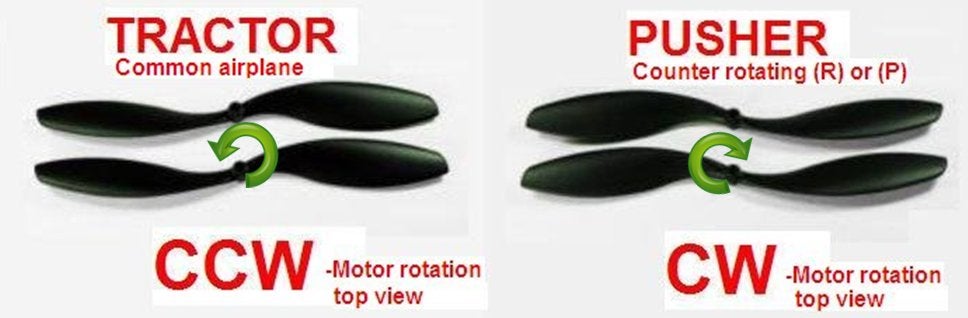 --Quad Factors 101 --Spreadsheet for UAVXPIC Model factors, PID, etc. Please add your parameter info! UAVXPIC Build Info --UAVXPIC Startup Document --UAVX WIKI --UAVP bare board mouser parts list --LY530 Gyro fix --UAVP/UAVXPIC breakout board reinforcement 101 --UAVX prop orientation 101 --UAVXPIC compass calibration 101 --Multicopter Dynamic Neutral stability, trim and balance setup 101 --USB to serial Prolific PC com port settings 101 --LED built-in sequencing and power options: https://www.rcgroups.com/forums/show...r#post13769414 and https://www.rcgroups.com/forums/show...r#post15420390 and https://www.rcgroups.com/forums/show...6#post16968701 --PIC Replacement 101 --UAVX 40Mhz upgrade WIKI --Initial Power-on testing 101 --The flux effects of wiring and lipos 101 UAVXPIC Cable: --UAVP programming cable build 101 --USB to RS232 Serial cable loopback testing 101 UAVX ESC: --ESC power switch option by Kb6mcc --I2c Quadroufo 30a ESC modification by Ken --Fast PWM mod firmware modification by Ken --Power switch for ESCs recommended for fast modded ESC's and 4s UAVXPIC Feature Info --TX stick parameter selection info --UAVX Failsafe info --UAVX Point of Focus 101 UAVXPIC Frequently asked questions and answers -- https://www.rcgroups.com/forums/show...postcount=3760 -- https://www.rcgroups.com/forums/show...postcount=3765 UAVXPIC GPS: --DPDT Switch for arm/disarm when using GPS --GPS Installation TIPs 101 --MiniGPS warning 101 --Programming GPS 101 --ETEK GPS wiring Info --Quadroufo Mediatek GPS wiring info --GPS TTL level converter info --UAVX and EagleTree V3 GPS signal sharing 101 UAVXPIC Tuning: --UAVX accelerometer fine tuning 101 --UAVX parameter fine-tuning 101 --UAVX PID fine-tuning 101 --UAVX baro/altitude hold tuning 101 UAVXPIC Tx/Rx --DX7/AR7000 UAVX setup --Futaba 9c Spektrum DM8/AR7000 UAVX setup info --Futaba 7c r617rs/OMM PPM adapter UAVX setup info Links to UAVXPIC Builds --Spreadsheet for UAVX Model factors, PID, etc. Please add your parameter info! --UAVX Specifications thread: https://www.rcgroups.com/forums/show...highlight=uavx --Tarro's UAVX article in Model Airplane News: https://www.rcgroups.com/forums/show...8#post16491413 --Daign's UAVX quad build: https://www.rcgroups.com/forums/show....php?t=1467525 --CyborgCNC's quad build: https://www.rcgroups.com/forums/show...postcount=2023 --Eddie P's quad build: https://www.rcgroups.com/forums/show....php?t=1297665 --JoeCNC2006 build: https://www.rcgroups.com/forums/show....php?t=1434843 --Kb6mcc's octo build: UAvx Octo 2nd flight and build log (4 min 44 sec) --MarvelAfrica's quad build: https://www.rcgroups.com/forums/show...x#post15870949 --Profuse8's quad build: https://www.rcgroups.com/forums/show....php?t=1280188 --RCVertt's quad build: https://www.rcgroups.com/forums/show....php?t=1307829 --SX's quad build: https://www.rcgroups.com/forums/show....php?t=1433855 --Tarro's quad build: https://www.rcgroups.com/forums/show...highlight=uavx --Tarro's octo build: https://www.rcgroups.com/forums/show....php?t=1275392 and https://www.rcgroups.com/forums/show....php?t=1275379 --Wac's quad build: https://www.rcgroups.com/forums/show....php?t=1309905 --Xnaron's quad build: https://www.rcgroups.com/forums/show...7#post15615788 --Xnaron's Tricopter build: https://www.rcgroups.com/forums/show...1#post16118944 UAVX Videos Video on UAVX v1.897 power on LED, beeper and flight sequence: This was a quick video done with a new key-fob cam I got a couple of days ago and decided to test out. Needs work I did not set the date I will make a better one later. As you can see in the video, it was gusting winds at about 15kts which are not the greatest conditions for AVP. The quad still flew well and you can hear the position hold beeps. A better camera mount and deshaker is what the serious AVPer would have done to improve the video, but that is not why this one was done. I forgot to mention in the video, that if you take off before the GPS has taken the initial fix, the GPS NAV modes are disabled for that flight. You can then still land and disarm and re-arm and then wait for the GPS to take its initial fix before launching to get it to go into NAV mode for position hold and RTH. This is done by Prof Greg for safety reasons as you do not want it to take the initial fix while you are airborne.UAVX arming beeps and lights info: --UAVX info for GPS status (4 min 15 sec) UAVX camera stabilization: --UAVX Camera Stabilization (0 min 30 sec) UAVX quad and MK octo at Austin RC -- MK Octo and UAVX at Austin RC in TX (4 min 11 sec) Larry's first UAVX flight: --UAVX Txflyboy2 aka Larry's first flight (8 min 16 sec)Baro and range-finder altitude hold demo: --UAVX v1.1049 flight test (3 min 8 sec) UAVX v1.1053 and fast PWM ESCs flight in wind: --UAVX Test Flight with FastPWM ESC and GKE 1053 (6 min 37 sec) UAVX v1.1053 Tarro quad flight in wind: --LIGHT HOUSE sample SHORT movie.wmv (0 min 38 sec) UAVX v1.1053 Tarro octo flight in wind: --http://www.youtube.com/user/FPVFLIGH...24/2WN0OssqghU UAVX v1.1134 Tricopter flight by Eaton: --UAVP tricopter (0 min 53 sec) UAVX v1.1074 Kisssys flight test: --UAVX_HomeSep.mp4 (6 min 14 sec) UAVX v1.1074 Tarro octo motor failure and safe landing: --https://www.rcgroups.com/forums/show....php?t=1324598 UAVX v1.1755 40Mhz GPS position hold by Ken --http://www.youtube.com/watch?v=RGJruMdc0eo --Fun Flying (1 min 54 sec) J�rg's UAVX VT-Copter early tests: --TRIcon-V4 UAVX (1 min 55 sec) |
|
|
Last edited by jesolins; Jul 17, 2015 at 07:08 PM.
Reason: Adding reference info
|
|
|
|
|
|
Congratulations to the both of you on getting this done, excellent work!
While I have all the hardware just about in place to support the UAVX I won't volunteer as a beta tester (officially anyway  ). I have the crash requirements sorted - just not enough successful flights ). I have the crash requirements sorted - just not enough successful flights
|
|
|
|


|
|
||
|
|
Greg,
To take full advantage of the UAVX and GPS functionality, you need a minimum of a 7 channel TX, so you meet that requirement. I will attach a photo of a mode 1 TX and the switch functionality for UAVX. The stick comands are of course used in the unarmed mode only. *Reposted from UAVP thread. Cheers, Jim Quote:
|
|
|
|
Last edited by jesolins; Oct 09, 2010 at 10:09 AM.
|
|


|
|
|
|
Thread OP
|
UAVX & UAVPSet 3.0
UAVX and UAVPSet 3.0 will be posted after I have my morning coffee and Jim finishes his evening meal.
We strongly advise only the brave and experienced try UAVX first and for the wise to learn from the posts  . .We expect it will be bedlam initially with many questions so bear with any delays. We will be dealing with the most clearly described problems first so please try to be coherent even if you are crying and weeping at the time. All posts to THIS thread please. Greg & Jim |
|
|
|
|
|
|
|
|
UAVX and UAVPset v3.0
All,
Congratulations and Thanks! to Greg on all the fantastic work he has done rewriting the firmware and getting GPS on the UAVP! There were 606 revisions to the code to get here today  The UAVX and UAVPset v3.0 are now posted in the Google Code Download area: http://code.google.com/p/uavp-mods/d...&ts=1250295190 Minimum requirements are posted in the WIKI: http://code.google.com/p/uavp-mods/w/list Cheers, Jim |
|
|
|
|
|
||
|
Thread OP
|
Quote:
Channel 7 is used to control the gain or strength of the GPS corrections. Below the 20% level the GPS corrections are disabled. Above 20% the strength of the correction is increased up to a maximum roll/pitch angle of about 20 deg which we have found to be enough in quite strong winds. If you are hovering the GPS will be maintaining your position. If you see it start to drift away from this position you will try to correct the position by moving the stick rather than waiting for the GPS correction. If you do this then the software will adopt the new position, to which the quadrocopter has drifted, as being the correct position. So if you repeatedly move the sticks then the quadrocopter will continue the drift. Greg |
|
|
|
||
|
|
||
|
|
Narpat,
Greg is probably fast asleep in the Down-under by now ...Deservedly so!We have not used or tested the Futaba 10CHP and the 14ch FASST RX with the UAVX. Here are a few things to try. Choose the Futaba ch3 in the pull-down menu and put the servo connectors on the odd channels. Typically you will have to reduce the end points for channel 5 to about 80% upper and lower. Use the UAVPset tools testfirmware to see how many channels pass and try to adjust the other channel upper and lower end points to about 80% accomplish this. If you get the channels to pass, then go to the graphic icon to fine tune the sliders using your TX EPA adjusts and subtrims. It is likely that you might only be able to get 5 channels without a converter as I believe that the channels are spaced differently. If this is the case and you only get 5 channels, you can still fly UAVX but without the GPS. The GPS requires the 7th channel to adjust sensitivity and influence. *Edit: In emails with Rusty, the 14ch RX has overlapping channels, so the above probably won't work. You can try getting these converters and use the Futaba ch3 and put a check in the RX to Quad = All Channels: - QuadroPPM sold by the Mikrokopter Shops - TT-RecEnc sold by another German shop. http://tt-rc.ath.cx/SHOP/ITEM-10 This was reported to work well, and comes mostly assembled. - Paparazzi PPM board- http://ppzuav.com/osc/catalog/produc...products_id=91 This looks good, but no flying reports yet. Rusty and OMM already have a solution to get the 7 channels with their converter board and the FASST R617FS RX, but I will let them address that. Here is a link to Rusty's converter: http://www.radrotary.com/OMMrxconver...erterRev2.html Also, I'm sure Rusty will be willing to trade you your 14ch for his R617FS and converter board ...or maybe not...Another option for you is to get a Spektrum module for your Futaba 10CHP and an AR7000 RX You would just use the Futaba 9C and Spektrum pull-down for that option for now. Cheers, Jim Quote:
|
|
|
|
Last edited by jesolins; Aug 15, 2009 at 08:50 AM.
|
|
«
Previous Thread
|
Next Thread
»
| Thread Tools | |


| Similar Threads | |||||
| Category | Thread | Thread Starter | Forum | Replies | Last Post |
| Discussion | Quadrocopter with GPS hold and return home when failsafe ??? | TTcuatro | Coaxial Helicopters | 2 | Sep 11, 2009 05:31 AM |
| Discussion | No more Miss Nice Girl....NOW updated with a new addition to the NiceGuy clan | MisterNiceGuy | Aerial Photography | 97 | May 03, 2008 04:49 PM |
| New - Hacker B50-11s Brusless Motor with 6.7:1 gear box! comes with Precision s | Joe Pierson | Aircraft - Electric - Airplanes (FS/W) | 0 | Mar 25, 2002 09:31 PM | |
| Web site updated with SE5a | AerodromeRC | Scale Kit/Scratch Built | 5 | Sep 08, 2001 07:41 PM | |