Archive for February, 2014
Posted by Jack Crossfire |
Feb 26, 2014 @ 05:45 PM | 9,179 Views
https://www.kickstarter.com/projects...t-with-virtual
sixense.com
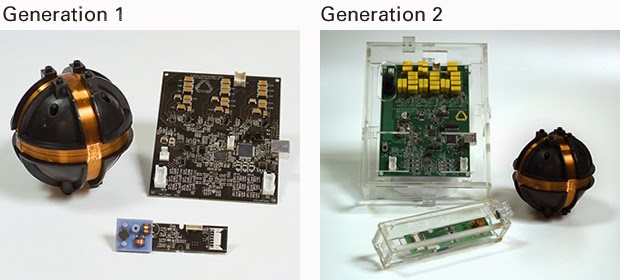
This was an interesting concept for indoor navigation. It's 1 of those ideas you're always aware of but dismiss because the electromagnets would be too weak. Someone actually tried it.
Magnetometers have gotten sensitive enough for it to work. Barely visible in the photo are 3 large inductors used by the roaming unit to sense very faint electromagnetic oscillation from the base station. The base has lots of capacitors for pulsing the coils with a very high current.
The roamer measures direction & intensity, but probably not time of flight. The intensity measurement is probably very bad. The 1mm precision they claim would be in tangential movement. 2 base stations could give it much better accuracy, but require alignment.
Increasing the range could be a matter of bigger inductors or a bigger base station. There are no teardowns or benchmarks. The consumers are all salesmen or reporters with no interest in how it works. There's no data on its precision at its maximum range of 8ft.
The advantages would be no calibration or alignment of cameras & no interference from ambient light. You could throw the base station down anywhere. In an explosion of lots of micro startups with lame ideas & no funding, this idea seems to have potential.
They remind me of Invensense, initially targeting the news maker of the time: 3D printing, & conspicuously avoiding any mention of the giant elephant in the room: drones. Invensense still targets phone cameras, making no mention of the millions of flying toys on their page.
Comments (0)
Add Comment
Posted by Jack Crossfire |
Feb 26, 2014 @ 06:13 AM | 9,339 Views

http://www.cnn.com/2014/02/25/health...en-amputation/
What a sad story that could have happened to anyone, doing any common activity. It shows how the house always wins. He got to see so many space shuttle launches, meet so many of the best of the best in their field, & get close to so much hardware more advanced than anything we'll ever see, an equally large payback defied all logic to emerge from the randomness of the universe & eventually catch up with him.
No matter how many slot machines you win, how many lucky stock trades you make, or how much of a fortune you inherit, the house always wins it back, eventually.
Posted by Jack Crossfire |
Feb 25, 2014 @ 04:34 AM | 9,077 Views
| Danville RC Car drive (6 min 32 sec) |
Still in pain because of yesterday's RC car testing & Friday's 23 miles, attempted a full RC car run. The heading hold was supplemented with steering by wire so a half stick deflection would change the target heading but not directly command the motor. A full stick deflection would bang the motor all the way over. It only activated active steering when throttle was active. With no throttle, only full stick deflection did anything. That overcame most of the limitations of the bang bang steering to keep it in a straight line.
Keeping up was a real fight, even going downhill. GPS reported it doing only 8m40s miles. Had it at full throttle for a very difficult 6 miles, then hit the wall.
Was extremely thirsty. The quads said continuing was going to cause injury. Walked for .4 miles, then slowly ran for 2 more, when the battery died after only 8.2 miles. Heading hold obviously sucks a meaningful amount of power. The throttle was easily modulated to give an 11 minute pace.
That brought its total mileage to 36.6. The front wheels got rotated. It's probably way beyond the normal life of these $40 toys.
| RC Car ASMR (7 min 59 sec) |
Posted by Jack Crossfire |
Feb 24, 2014 @ 12:16 AM | 9,659 Views
It's a tale as old as time, but no-one did it for the least cost. Put in a simple analog gyro & P feedback algorithm. There's just enough proportionality in the bang bang steering for it to work quite well.

Didn't bother with I feedback, since it would suck battery power to constantly drive the steering motor. The steering is so imprecise, it always oscillates around the desired heading. The heading drifts noticeably. Upgrading to a full IMU would require a new CPU.
| RC Car heading hold tests (5 min 15 sec) |
It can go without manual steering for a bit longer than before. Rough road is now effortless to drive over. It's come a long way from its stock $40 ways, with a crusty old microcontroller with only 256 bytes of RAM.
...Continue Reading
Posted by Jack Crossfire |
Feb 22, 2014 @ 07:15 AM | 8,569 Views
Only 2 months remane before leaving Calif* again. Hard to believe this valley which has been the status quo for so long is going to be gone. Probably won't return, this time.
For 10 years, I had a taste of the lower middle class lifestyle, having cush engineering jobs without actually having an engineering degree, having disposable income, being able to buy crap. As long as you had any experience writing any kind of software as a hobby, it was fairly easy for biology majors to get in.
In reality, it was the steadily declining embers of the 1st dot com boom propping up a lot of natural science majors who would normally have to work at Walmart. Those jobs are now gone & the formal system that dominated most of history is back. The collapse that began in 2001 has finally reached the rest of us.
There was a list of things to do before leaving Calif*. Did most of it 4 years ago, when the signs of the end were beginning to appear. The mane things I'll miss are Eastern Bakery in San Francisco & driving down the 5 to run in Jesus Heroine's races.
Never actually made any money after that 1st round of college. It all went to student loans, taxes, & rent.
The good news is I'll be able to feel the warm water of the gulf of Mexico again & visit mom, if she makes it to the next holidays.
For 10 years, I had a taste of the lower middle class lifestyle, having cush engineering jobs without actually having an engineering degree, having disposable income, being able to buy crap. As long as you had any experience writing any kind of software as a hobby, it was fairly easy for biology majors to get in.
In reality, it was the steadily declining embers of the 1st dot com boom propping up a lot of natural science majors who would normally have to work at Walmart. Those jobs are now gone & the formal system that dominated most of history is back. The collapse that began in 2001 has finally reached the rest of us.
There was a list of things to do before leaving Calif*. Did most of it 4 years ago, when the signs of the end were beginning to appear. The mane things I'll miss are Eastern Bakery in San Francisco & driving down the 5 to run in Jesus Heroine's races.
Never actually made any money after that 1st round of college. It all went to student loans, taxes, & rent.
The good news is I'll be able to feel the warm water of the gulf of Mexico again & visit mom, if she makes it to the next holidays.
Posted by Jack Crossfire |
Feb 20, 2014 @ 01:24 AM | 9,208 Views
| RC car range test (4 min 20 sec) |

Finally did the range test with the RC car by running up & down a 1/2 mile segment of road. That was really hard. The voltage was regulated at 7.4V. It went 9.5 miles at a constant 7.1mph downhill, 6.7mph uphill. Speed quickly faded after 9 miles.
The recharge was 85 minutes at 2A. The run was also 85 minutes, giving 2A of consumption. This 8 year old battery was originally rated at 3.3Ah & still has 3Ah of capacity, if run all the way to destruction at 2A.
So the speed was constant but the range was 2 miles longer than stock 1.5Ah AA's. It put a lot more wear on the tires than stock batteries. It's practical for a tempo run, but not for a long distance movie. The voltage would have to be reduced, which would require another range test. The long distance movie would be more easily done with an unregulated 2S battery than a regulated 3S battery.
It still takes a lot of energy to drive & run simultaneously, despite the ergonomic controller. It was also after running 4.85 intense miles the day before. Turning around every 1/2 mile probably made it harder.
It's interesting to note the elevation change on the circular course was only 45 feet, yet had a significant impact on the car's speed. The challenge in running uphill on that segment is not just psychological.
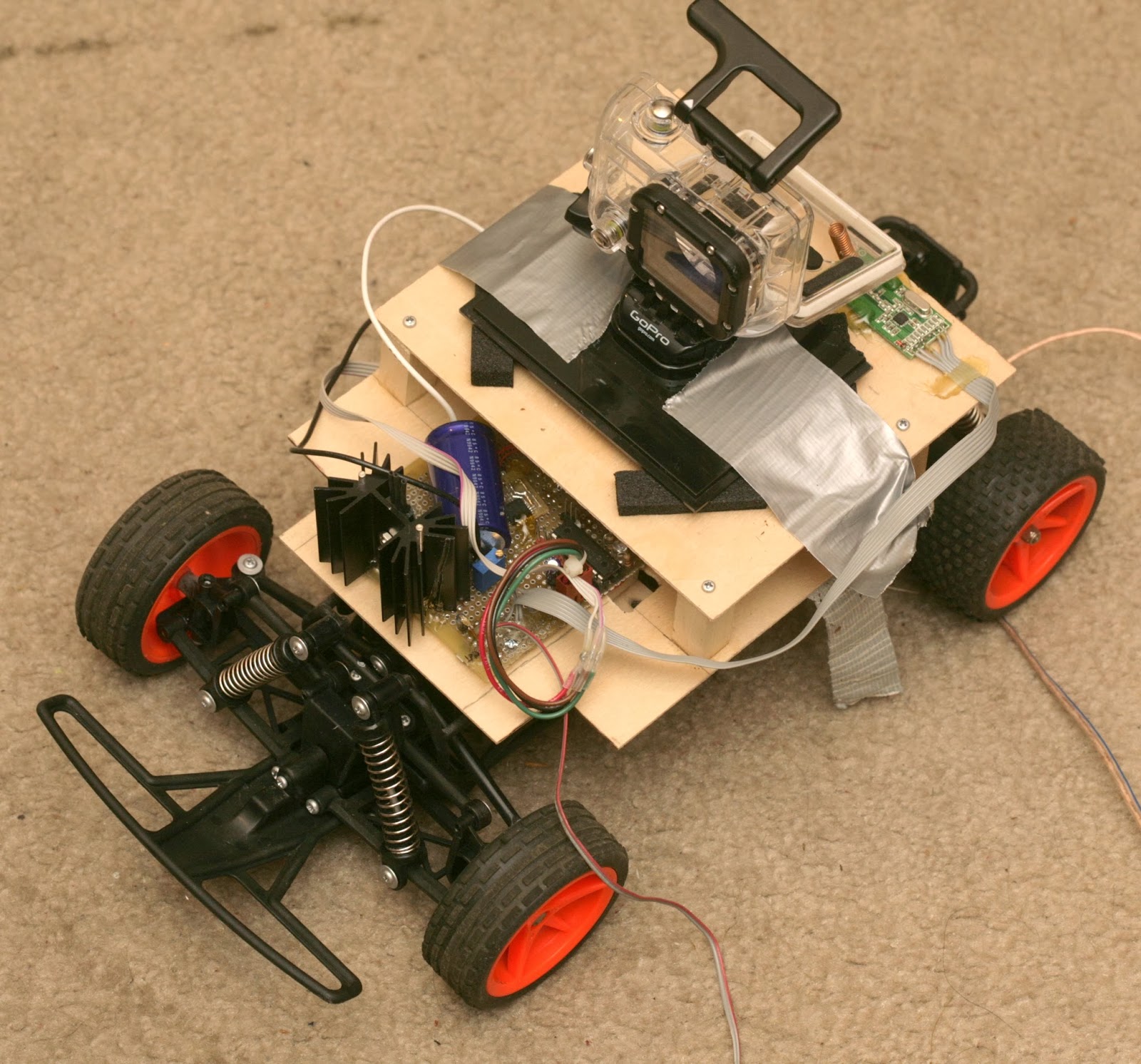
Foam under the camera greatly aided the oscillation.
| 2 voltage steering (7 min 51 sec) |
Posted by Jack Crossfire |
Feb 18, 2014 @ 01:10 AM | 8,801 Views
| RC Car Run 4 (10 min 59 sec) |
Ran 4 miles with the RC car. The ergonomic hand controller was a joy. It's like the car is an extension of your body. Too bad the status quo in commercial products is too big to fail. The radio worked perfectly.
The throttle worked nicely. The steering was still worthless. It was too inconsistent. The next step would be 2 steps only, with hard coded PWM.
The battery finished at 11.7V. It took 2Ah to go 4 miles. At 7.4V regulated output, it did 8m30s miles downhill & 9 minute miles uphill. This seems to be the motor's most efficient speed. The voltage regulator was perfectly matched to the heatsink.
All the improvements only made the speed more stable. The range was greatly reduced.
The battery sliding out & roll overs were problematic. The battery straps served no purpose. The camera definitely has a sympathetic oscillation. Another gopro firmware crash robbed most of the footage.
Gadgets are still trash & most web apps/cloud services don't work, but it's a lot better than 1999. The 1st dot coms had to fail to have any improvement. Now, the stock market isn't being allowed to fail & the trash is never improving.
Posted by Jack Crossfire |
Feb 17, 2014 @ 03:10 AM | 8,388 Views

It ended up being a system of pieces of wood of various heights to attach to 6 existing screw points.

After all that work, 2 of the screw points ended up inaccessible, so they were left unattached.
...Continue Reading
Posted by Jack Crossfire |
Feb 16, 2014 @ 03:48 AM | 7,650 Views


Posted by Jack Crossfire |
Feb 15, 2014 @ 06:51 PM | 7,465 Views

After every attempt to revive it, the phone that ran in 2 Jesus Heroine races was finally replaced by a new copy of the same model & T-Mobile was voted off the island after 8 years. The best theory is salt got somewhere inside the touch screen area & couldn't be removed. It's still the only affordable phone.

There was hope to exchange parts from the new phone & stay on the old plan, but none could be exchanged. The mane board was drastically changed. The new version had nearfield communication & rearranged contacts. Maybe the old LED can be used in a flashlight.
...Continue Reading
Posted by Jack Crossfire |
Feb 13, 2014 @ 06:48 AM | 7,582 Views
The problem is it has erroneous oscillations above 0.5m, as the bank angle influences the detected movement more. Tried downsampling the readings to 10Hz. That did nothing. Tried throwing out readings of quality 0 like autoquad does. That did nothing.
Time for another stab at the raw data like autoquad does. The PX4flow must not do very good bank cancellation.
Time for another stab at the raw data like autoquad does. The PX4flow must not do very good bank cancellation.
Posted by Jack Crossfire |
Feb 12, 2014 @ 03:28 AM | 7,763 Views
So the phone returned from LG untouched. They didn't accept payment or try to repair it. None of the damage they reported was there. They probably can't really repair it, but either replace it or make up any excuse they can to do nothing at all.

Tried again to restore it by soaking the touch panel in water. Maybe it would dissolve salt from a gasket that was interfering with the sensor. Then tried scraping salt from the frame. It still didn't work.
This phone is now sold for $100 on Virgin. They have better plans, using the obsolete Sprint network. The obsolete Sprint network is still better than T-Mobile, which offers no data for under $40.
The parts could be used for a repair or the extra $5 could be paid for a Sprint plan. It would not be viable to pay for an unlocking code to stay on T-Mobile. Assuming no design changes, the mane board can be swapped.

...Continue Reading
Posted by Jack Crossfire |
Feb 11, 2014 @ 06:32 AM | 7,522 Views
| Autoquad optical flow demo (2 min 39 sec) |
Pretty good & frustrating demo of what the PX4flow can do. The obvious advantages are: large airframe, large propellers, lots of ground detail. Surprised the banking didn't throw off the optical flow. He used a unified kalman filter & did significant processing of the raw optical flow data.
Next, we have him recording a flight by walking around with the aircraft & playing it back. The next step would be copying parts of autoquad. It's probably what arducopter based its kalman filter on.
| AUTOQUAD: Waypoint Live Recording V3 (WLR V3) (4 min 41 sec) |
Posted by Jack Crossfire |
Feb 10, 2014 @ 03:57 AM | 7,190 Views

Decent pot arrangement. The trick is lots of hot glue & wood. A wheel would be better than a stick for steering.

Another iteration with production wood. Unfortunately, the steering stick has a finite number of gluings. There was no other way to attach it than with a giant blob of glue. The throttle stick wants to angle away from the camera, which would require a heavier piece of wood.
...Continue Reading
Posted by Jack Crossfire |
Feb 08, 2014 @ 04:02 AM | 10,165 Views


The buck converter was most efficient at 120Hz. It peaked at 9V 2.3A. To make that, it consumed 12V 2A for 82% efficiency.
The nominal use is 7.5V 1.5A. Lacking a real dummy load, it produced 7.5V 1.9A by consuming 12V 1.7A for 70% efficiency. The MOSFET still heated up over 75C. The efficiency was probably overstated because the load resistance was not accurately known.
The dropout voltage at nominal use was 3V. It's a much worse dropout voltage than an LM317. A pair of LM317's with a big heat sink would do the job in much less space. They have a 2.5V dropout voltage & heat to below 50C while providing 8V 1.7A.
A linear regulator would be 62% efficient. The circuit is definitely not the most ideal, probably owing to the MOSFET being extremely slow. The Castle 10A BEC can do a whole lot better in a lot less space, but this is the age of spare parts.
Would consider the lack of efficiency, weight of the inductor, size of the circuit & dropout voltage deal breakers for the buck converter.
Posted by Jack Crossfire |
Feb 04, 2014 @ 10:08 PM | 8,227 Views
It's a problem as old as time, we all encountered eventually. Now that the venture capitalists have latched on to wearable computing, it's a problem we have to face, whether or not it's any more solvable.
Today's problem is proportional steering & throttle with 1 hand. It begins by tearing down a picco Z controller for sticks. It would be ideal, since it was rugged & used single axis sticks. There's no chance the 8 year old controller would ever be used again.


...Continue Reading
Today's problem is proportional steering & throttle with 1 hand. It begins by tearing down a picco Z controller for sticks. It would be ideal, since it was rugged & used single axis sticks. There's no chance the 8 year old controller would ever be used again.


...Continue Reading
Posted by Jack Crossfire |
Feb 03, 2014 @ 11:36 PM | 7,251 Views


It's probably equivalent to where it was in Sep 2013. The rate of rate gyro feedback seems to have stabilized it, slightly. The barometer is disabled, giving it tighter but more twitchy altitude. The buster was a new manual control interface. That brought out a lot of deficiencies that don't come out in a waypoint playback.
After all the work copying the DCM, came to the conclusion that the DCM is worthless, indoors. Consider that the equilibrium is perfectly level, indoors. The only nonzero angles are from IMU drift. If it turns, the DCM is going to swap the roll & pitch angles, when in fact the roll & pitch should be unchanged since they're from drift in the copter frame.
The DCM is best suited for outdoors, where wind causes a real nonzero equilibrium. So everything needed to be reverted to the straight integration, with all the gyro biasing & floating point added to those routines.
For some flights, the IMU doesn't drift. For others, it drifts.
- User Lists







