Archive for March, 2014
Posted by Jack Crossfire |
Mar 30, 2014 @ 08:59 PM | 7,868 Views
| Iron Horse Trail complete (15 min 11 sec) |
| Iron horse trail south (15 min 12 sec) |
Comments (0)
Add Comment
Posted by Jack Crossfire |
Mar 30, 2014 @ 02:21 AM | 7,970 Views

The stock battery position is tail heavy.
The fuselage can be flipped over, making a flat surface.
...Continue Reading
Posted by Jack Crossfire |
Mar 26, 2014 @ 06:24 PM | 8,049 Views
So the human race lost a 777 & couldn't find it again. It's not the 1st time a plane disappeared over the ocean, never to be found again, but it is the largest.
It took 75 years for humans to find the Titanic. They had much better knowledge of its location. It was just a matter of towing a sonar scanner in a small area until someone found it. It took a military budget, of course. There was so much defense spending in the 1980's that massive amounts of money were going into sonar technology & a mission to find a sunken submarine could afford to take a detour & hunt for Titanic. That would be unaffordable today.
The problem is satellites capable of high resolution imaging still can only fly in low Earth orbit. They can get only 1 photo of a single point per day, only when the weather is good. They can't afford synthetic aperture radar to penetrate clouds.
Finding the debris field of a 777 would take a geostationary satellite capable of 1 meter resolution of the entire planet, several times per hour. The largest object humans can put in geostationary orbit is 28,000lbs. We can't build a bigger rocket. Hubble weighs 24,000lbs & can only get the required resolution from low earth orbit.
The required satellite would probably weigh over 100,000lbs. The rocket would have to be 360ft tall & put out 7 million lbs of thrust. The human race could never afford it.
Malaysia put an enormous amount of effort into burying the crash as fast as...Continue Reading
It took 75 years for humans to find the Titanic. They had much better knowledge of its location. It was just a matter of towing a sonar scanner in a small area until someone found it. It took a military budget, of course. There was so much defense spending in the 1980's that massive amounts of money were going into sonar technology & a mission to find a sunken submarine could afford to take a detour & hunt for Titanic. That would be unaffordable today.
The problem is satellites capable of high resolution imaging still can only fly in low Earth orbit. They can get only 1 photo of a single point per day, only when the weather is good. They can't afford synthetic aperture radar to penetrate clouds.
Finding the debris field of a 777 would take a geostationary satellite capable of 1 meter resolution of the entire planet, several times per hour. The largest object humans can put in geostationary orbit is 28,000lbs. We can't build a bigger rocket. Hubble weighs 24,000lbs & can only get the required resolution from low earth orbit.
The required satellite would probably weigh over 100,000lbs. The rocket would have to be 360ft tall & put out 7 million lbs of thrust. The human race could never afford it.
Malaysia put an enormous amount of effort into burying the crash as fast as...Continue Reading
Posted by Jack Crossfire |
Mar 25, 2014 @ 09:16 PM | 7,952 Views

Not quite the $15 billion they spent on Whatsapp last month, but still more than the $1.1 billion they spent on Instagram. The speculation is for grand universes of virtual reality news feeds, virtual reality sharing of private UAV flights, but the reality is probably more down to Earth. It's a play on injecting advertizing into the video feeds that go into the Occulus Rift, with some algorithm that tries to make it relevant to the content of the video feeds. The history of Facebook acquisitions has been pretty disastrous. Instragram went absolutely nowhere.
Occulus VR, like most multi billion dollar startup acquisitions, has never shipped a product. The closest they ever got was a development kit. Now development kit 1 is discontinued & they're still planning a version 2, someday.
The big question when reading about these escalating buyout prices is how much Google is going to pay for 3D Robotics. It'll undoubtedly be the largest robotics buyout ever. Someone actually sat down & made a list of Google's acquisitions.
http://en.wikipedia.org/wiki/List_of_mergers_and_acquisitions_by_Go...
It's interesting to note that the entire Android universe started out as a $50 million acquisition while the $12 billion Motorola acquisition went down like a lead weight.
To save themselves from looking like the complete idiots they are, Google doesn't normally disclose their buyout prices, but 3D Robotics will probably be sold for $30...Continue Reading
Posted by Jack Crossfire |
Mar 25, 2014 @ 05:50 AM | 8,304 Views

Posted by Jack Crossfire |
Mar 22, 2014 @ 05:10 AM | 8,482 Views
US tracks all of his submarines & a cruise missile would be shot down. An ICBM would probably be shot down. What was left of missile defense after it was defunded in 2009 is 50% effective. US would launch the last 2 missiles it could afford from Vandenburg. 1 would fail & the other would work.
He would have to use a stealth bomber with over 6000 miles of range. There wouldn't be a retaliation like there was in 1941, no Doolittle raid on Moscow, no speeches. At most, there would be a ban on Russian basketball players entering Baltimore. The days of Franklin Roosevelt democrats are over.
He's not going to bomb Pearl Harbor, but he might bomb Idaho through some kind of Canadian alliance. It's surprising how fast a country loses independence after it runs out of money & how little mercy there is from international partners, just like a corpse in the jungle getting devoured by the lions.
The planet of nerdfighters living in harmony our generation believes in only exists because someone still produces something, the rest refinance it, & the money keeps flowing. Without money, you don't even get a thank you note from your British buddies. You just disappear as fast as a missile can fly. There's no grace period, no forbearance, no government bailout.
He would have to use a stealth bomber with over 6000 miles of range. There wouldn't be a retaliation like there was in 1941, no Doolittle raid on Moscow, no speeches. At most, there would be a ban on Russian basketball players entering Baltimore. The days of Franklin Roosevelt democrats are over.
He's not going to bomb Pearl Harbor, but he might bomb Idaho through some kind of Canadian alliance. It's surprising how fast a country loses independence after it runs out of money & how little mercy there is from international partners, just like a corpse in the jungle getting devoured by the lions.
The planet of nerdfighters living in harmony our generation believes in only exists because someone still produces something, the rest refinance it, & the money keeps flowing. Without money, you don't even get a thank you note from your British buddies. You just disappear as fast as a missile can fly. There's no grace period, no forbearance, no government bailout.
Posted by Jack Crossfire |
Mar 20, 2014 @ 03:04 PM | 8,673 Views
| Brushless gimbal fail (0 min 41 sec) |
It's not very often that a problem can't be solved, but this one is busted. Using only P & D, the gimbal should stay level. Instead, it's deflecting by a fixed amount. It doesn't matter how fast or slow it's moved. It's deflecting by the same amount.
Because the deflection is always the same amount, it should be possible to compensate it out, without an I term. The I term should only compensate for the variable drift from thermal noise. The fixed rate drift has happened with some designs in the past, but not others.
With the current design, it has been a permanent fixture. The only change was using an I2C buffer. Direct I2C had 0.7ms of latency because it had to use a very slow clockspeed. The I2C buffer can get it down to 0.5ms of latency with no heavy shielding.

So after trying 2 different gyros, reducing the latency to 0.5ms, increasing the gain to 250'/s, the drift was exactly the same. There was no correlation between P & drift.
Posted by Jack Crossfire |
Mar 17, 2014 @ 01:49 AM | 9,971 Views
Though taken up & abandoned many times, there is still hope for better gyro stability through temperature compensation. Every gyro datasheet mentions a temperature readout, but no explanation of how to use it.
It depends on how the package was soldered, stresses on the package once soldered. It requires making a unique table for the gyro across a wide range of temperatures. Arducopter doesn't use temperature compensation for the MPU6000, but for a mass produced product like that, it would be really hard to make a table for each unit.
In an effort to make its heading more stable, made a table for the brushless gimbal from room temperature to operational temperature. Since the gyro drift is far below the gyro noise, the table has to be made by averaging many seconds of gyro data.


...Continue Reading
It depends on how the package was soldered, stresses on the package once soldered. It requires making a unique table for the gyro across a wide range of temperatures. Arducopter doesn't use temperature compensation for the MPU6000, but for a mass produced product like that, it would be really hard to make a table for each unit.
In an effort to make its heading more stable, made a table for the brushless gimbal from room temperature to operational temperature. Since the gyro drift is far below the gyro noise, the table has to be made by averaging many seconds of gyro data.


...Continue Reading
Posted by Jack Crossfire |
Mar 14, 2014 @ 05:59 AM | 9,410 Views
There's a $15,000 tag between now & September when student loans resume. Then, the carnage drops to some lower amount. That's a rough estimate indeed.
It's definitely the time when you realize your career was a coincidence & now it's time to pay your dues. Even if another job came along in the next 2 years, I would stay in school this time.
It's important to remember those lucky strikes were short lived, paid significantly below average, resulting in not owning any houses, not marrying, not having any vacations, not doing any of the stuff those who followed the traditional path of 1 degree, 1 job for life did. The long term effect was to now be soaked in rent.
The mane question is whether to finish at age 41, with another BS degree & underwater or stay in until age 43 with a MS degree & a lot more underwater. Either way, it's going to be starting over while my peers own properties that now generate massive rental income & capital gains. They had a momentary low point in 2009, but now they're making a killing, with almost no dependance on their salaries.
There are some peers going back to school with no equity, but they're definitely the exception.
It's definitely the time when you realize your career was a coincidence & now it's time to pay your dues. Even if another job came along in the next 2 years, I would stay in school this time.
It's important to remember those lucky strikes were short lived, paid significantly below average, resulting in not owning any houses, not marrying, not having any vacations, not doing any of the stuff those who followed the traditional path of 1 degree, 1 job for life did. The long term effect was to now be soaked in rent.
The mane question is whether to finish at age 41, with another BS degree & underwater or stay in until age 43 with a MS degree & a lot more underwater. Either way, it's going to be starting over while my peers own properties that now generate massive rental income & capital gains. They had a momentary low point in 2009, but now they're making a killing, with almost no dependance on their salaries.
There are some peers going back to school with no equity, but they're definitely the exception.
Posted by Jack Crossfire |
Mar 13, 2014 @ 12:22 AM | 11,600 Views
After a day of banging on the Virgin LG Optimus F3, it became quite clear that Android stopped using wireless extensions, some time in 2013. Compiled iwconfig, iwlist using the Android NDK & wireless tools.
Fortunately, the tethering apps like foxfi & core technology actually got a partial access point working but could not give an IP address over DHCP. Finally rooted it, got fully functional ifconfig, iptables, & access to the /etc directory. Manually set the IP addresses, /etc/resolv.conf, routing table, firewall & it worked.
The apartment has only 3G. The phone gets hot & the battery doesn't last long.
Download: 2.16 megabit
Upload 0.74 megabit.
For someone who lived in a time of EDGE, GSM, T-1, 56k flex, & 1200 baud it's pretty good for portable internet access. The 2.5 gig data cap goes really fast when accessed from a laptop. As bad as the data cap is & the fact that the data cap wouldn't even download a movie, the responsiveness is worth something.
It takes a lot of typing to bring up. The journey begins by rooting it. It still uses motochopper which is everywhere & nowhere. Most goog results are just advertizements.
motochopper is just a .bat file which uses adb to upload the ages old pwn exploit. You can do all the rooting on the Linux command line. Android devices are becoming less rootable, but this phone was lucky. The pwn program could also root a 4.1.1 Asus transformer, but no later versions.
...Continue Reading
Fortunately, the tethering apps like foxfi & core technology actually got a partial access point working but could not give an IP address over DHCP. Finally rooted it, got fully functional ifconfig, iptables, & access to the /etc directory. Manually set the IP addresses, /etc/resolv.conf, routing table, firewall & it worked.
The apartment has only 3G. The phone gets hot & the battery doesn't last long.
Download: 2.16 megabit
Upload 0.74 megabit.
For someone who lived in a time of EDGE, GSM, T-1, 56k flex, & 1200 baud it's pretty good for portable internet access. The 2.5 gig data cap goes really fast when accessed from a laptop. As bad as the data cap is & the fact that the data cap wouldn't even download a movie, the responsiveness is worth something.
It takes a lot of typing to bring up. The journey begins by rooting it. It still uses motochopper which is everywhere & nowhere. Most goog results are just advertizements.
motochopper is just a .bat file which uses adb to upload the ages old pwn exploit. You can do all the rooting on the Linux command line. Android devices are becoming less rootable, but this phone was lucky. The pwn program could also root a 4.1.1 Asus transformer, but no later versions.
...Continue Reading
Posted by Jack Crossfire |
Mar 12, 2014 @ 02:16 AM | 9,218 Views
Altimeter was all over the place. Seemed to be power distribution interfering with the cable routing or having the mane board under the frame.
Flight time was 2 minutes & maneuvering was real lousy. It definitely moved like a single female, very overweight & unwieldy.
It had to stay far from the walls to prevent crosstalk, yet be close enough to prevent detecting the floor. Didn't have any obvious floor detection at 1.5m from the walls & 0.3m altitude.
Velocity needed to be updated at 10Hz to have any success.
Absolute position was excellent. There was no more drifting.
Would recommend wearing laser goggles.
IMU drift made it drift. Would need to start over on the vibration problem, with a mane board under the fuselage.
The video has several attempts to hover, several attempts at a waypoint mission. The waypoints failed because of an unknown software bug. The final flight was an attempt to hover, with the PID gains converging in on decent values. The testing ended when an arm broke, despite all the double layer wood.
Flight time was 2 minutes & maneuvering was real lousy. It definitely moved like a single female, very overweight & unwieldy.
It had to stay far from the walls to prevent crosstalk, yet be close enough to prevent detecting the floor. Didn't have any obvious floor detection at 1.5m from the walls & 0.3m altitude.
Velocity needed to be updated at 10Hz to have any success.
Absolute position was excellent. There was no more drifting.
Would recommend wearing laser goggles.
IMU drift made it drift. Would need to start over on the vibration problem, with a mane board under the fuselage.
| Lidar failure compilation (3 min 50 sec) |
The video has several attempts to hover, several attempts at a waypoint mission. The waypoints failed because of an unknown software bug. The final flight was an attempt to hover, with the PID gains converging in on decent values. The testing ended when an arm broke, despite all the double layer wood.
Posted by Jack Crossfire |
Mar 11, 2014 @ 03:17 AM | 10,341 Views

1 of the sensors failed. Tried focusing it, but it wouldn't detect farther than 1m.
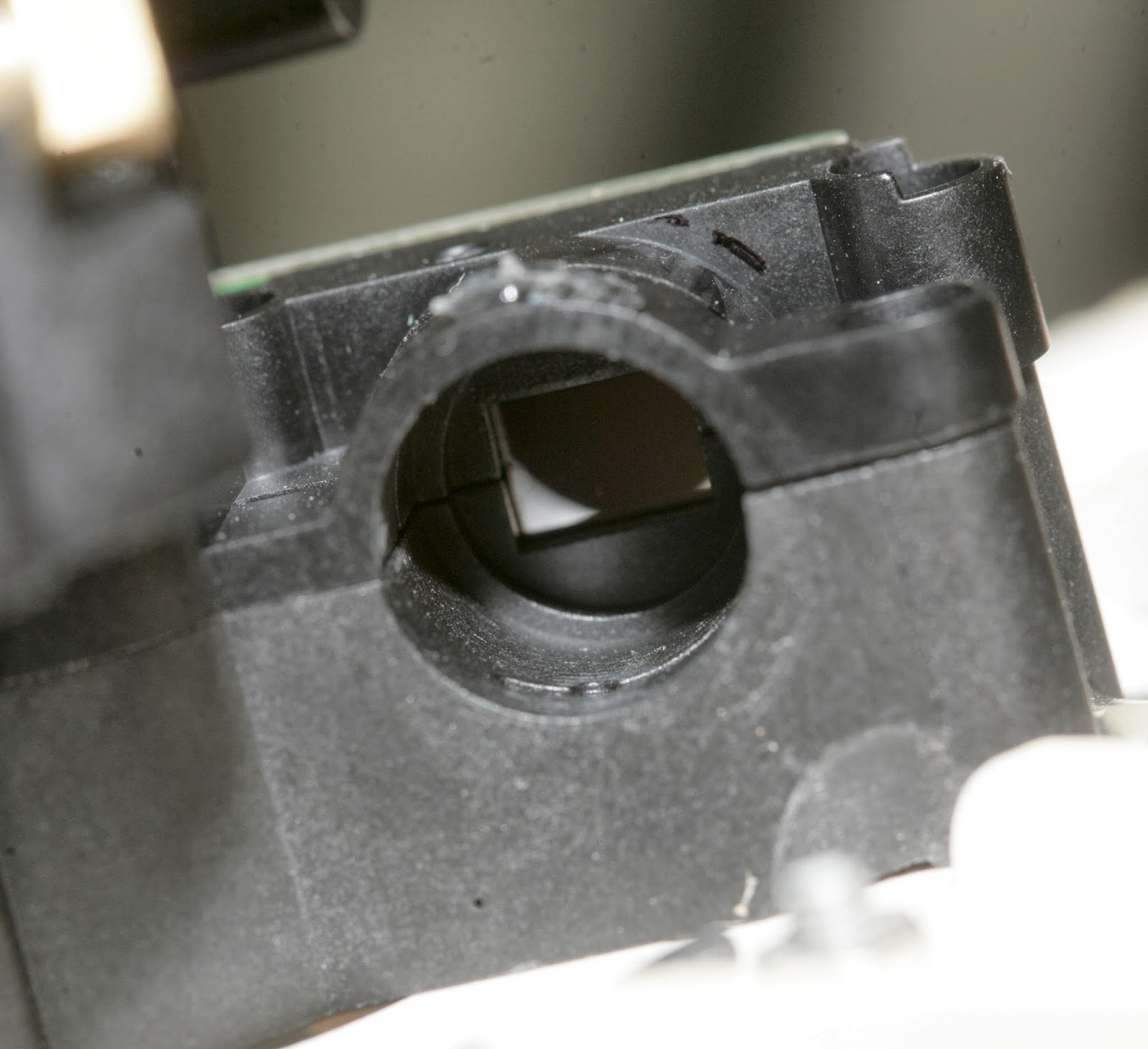
It doesn't have any focusing threads. It just slides in & out.
...Continue Reading
Posted by Jack Crossfire |
Mar 10, 2014 @ 05:10 AM | 9,134 Views
battery mounting, IMU calibration, PID constants, &

the issue of successfully defeating the IMU vibration in a new position, it became quite clear

...Continue Reading
Posted by Jack Crossfire |
Mar 08, 2014 @ 08:42 PM | 10,080 Views
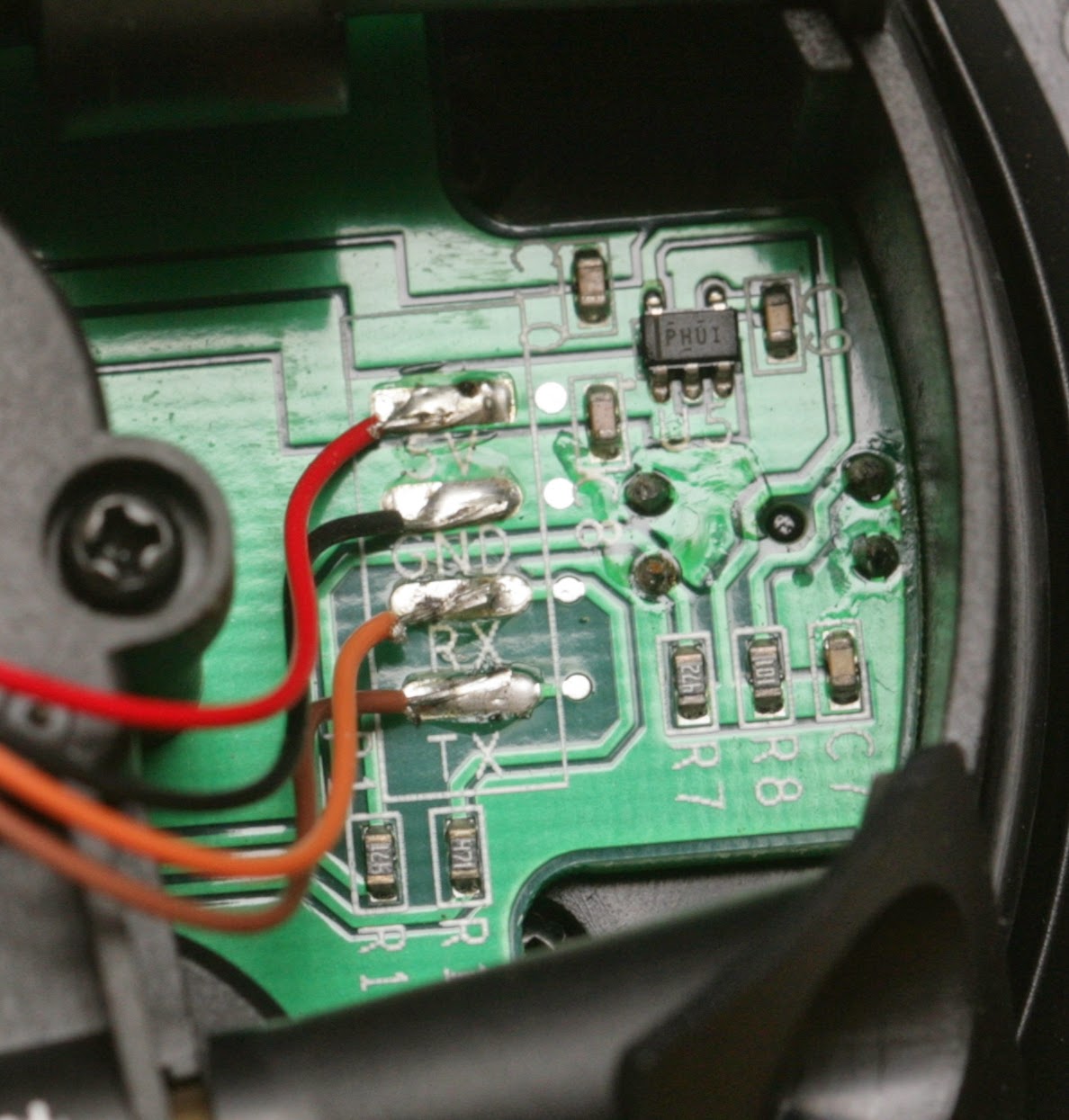
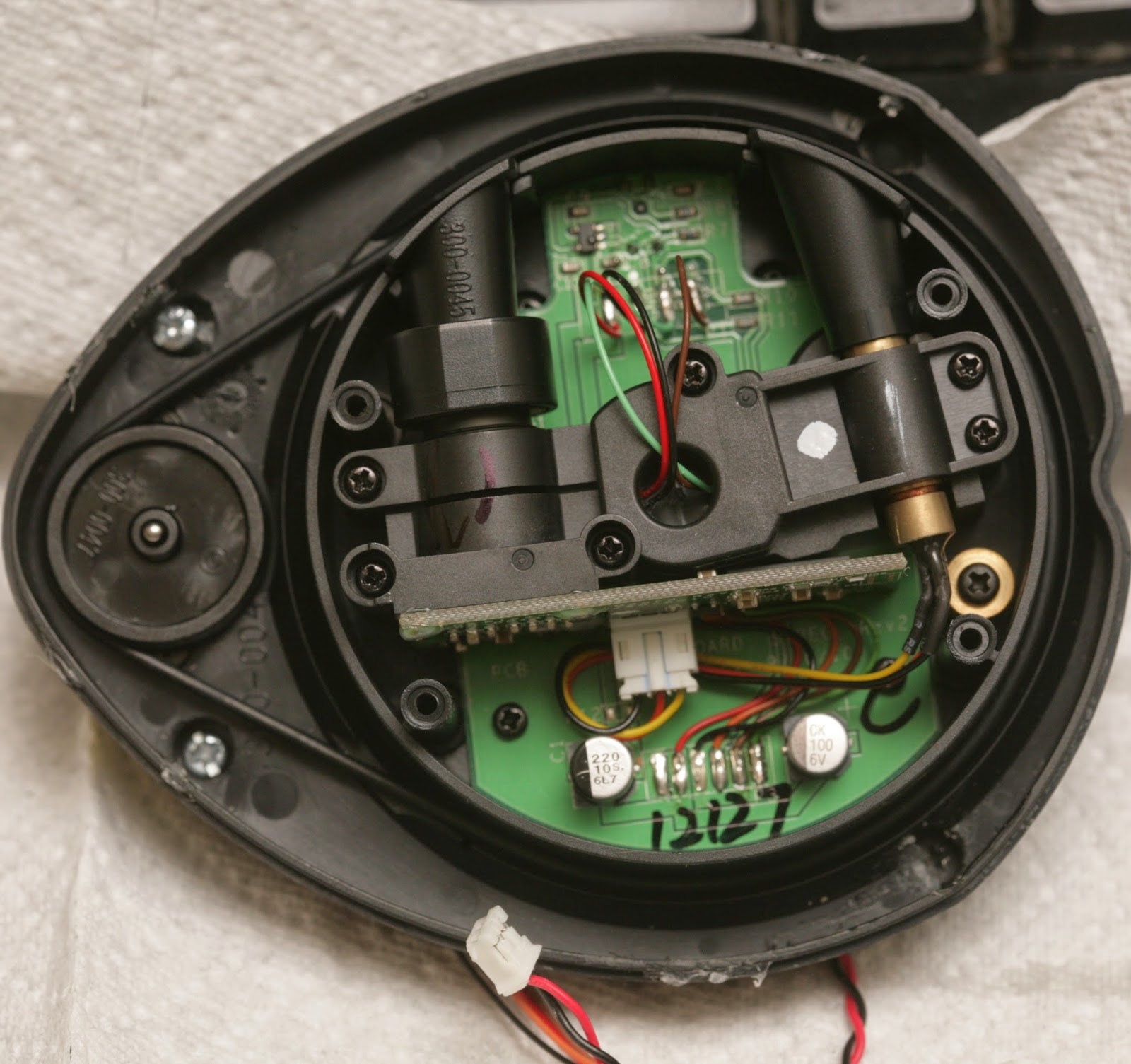
In true silicon valley H1B worker fashion, the TX & RX labels were reversed. TX on a device normally means signal going out of the device, but the sensor has it meaning signal going into the device.

After a day of getting only error codes from the XV-11, the problem narrowed down to the rotation sensor. Then it became clear that it needed a very very specific signal from its rotation sensor.
Lacking any meanings for the error codes, the key was reading the rotation rate encoded in the packets. The internet claimed a very narrow range of 180-360 rpm being required. There was no way it could do more than 6 scans per second.
Even with a stock sensor that still spins, with the RPM perfectly dialed in, most of the readings were error codes. The stock motor needed to be down to 2.8V before it was slow enough. Then, there was routing the stock rotation sensor through the TX pin to capture it.
...Continue Reading
After a day of getting only error codes from the XV-11, the problem narrowed down to the rotation sensor. Then it became clear that it needed a very very specific signal from its rotation sensor.
Lacking any meanings for the error codes, the key was reading the rotation rate encoded in the packets. The internet claimed a very narrow range of 180-360 rpm being required. There was no way it could do more than 6 scans per second.
Even with a stock sensor that still spins, with the RPM perfectly dialed in, most of the readings were error codes. The stock motor needed to be down to 2.8V before it was slow enough. Then, there was routing the stock rotation sensor through the TX pin to capture it.
...Continue Reading
Posted by Jack Crossfire |
Mar 07, 2014 @ 04:07 AM | 10,141 Views
https://www.google.com/patents/US812...ed=0CDUQ6AEwAA
https://drive.google.com/file/d/0Bwb...it?usp=sharing
It's amazing someone actually spends all day reading the dense, obscure wording of patents, either searching for ideas to copy, searching for conflicts, or working for the patent office. Patents have to be deliberately obtuse & cryptic in order to hide the invention, yet still contain enough information in the fine print to defend the invention. They're good sources of MCAT questions.
Most of the Lidar Lite patent seems to concern the differentiation of the measurement signal from the background noise. They mention searching for edges in the waveform.
A small amount of it concerns sending a logic pattern, passing the reflected signal through an AC coupling filter, many delay lines of varying length, sampling the delayed reflections with a very high end comparator on the order of 1 Ghz, & correlating the many delayed reflections with the original pattern.
The way the correlation counts the number of matching edges instead of subtracting analog levels seems to be the invention. The enabling technology for cheap lidar is the lower cost of a high end comparator. It's otherwise a standard way of measuring distance.
https://drive.google.com/file/d/0Bwb...it?usp=sharing
It's amazing someone actually spends all day reading the dense, obscure wording of patents, either searching for ideas to copy, searching for conflicts, or working for the patent office. Patents have to be deliberately obtuse & cryptic in order to hide the invention, yet still contain enough information in the fine print to defend the invention. They're good sources of MCAT questions.
Most of the Lidar Lite patent seems to concern the differentiation of the measurement signal from the background noise. They mention searching for edges in the waveform.
A small amount of it concerns sending a logic pattern, passing the reflected signal through an AC coupling filter, many delay lines of varying length, sampling the delayed reflections with a very high end comparator on the order of 1 Ghz, & correlating the many delayed reflections with the original pattern.
The way the correlation counts the number of matching edges instead of subtracting analog levels seems to be the invention. The enabling technology for cheap lidar is the lower cost of a high end comparator. It's otherwise a standard way of measuring distance.
Posted by Jack Crossfire |
Mar 07, 2014 @ 02:03 AM | 9,905 Views

Posted by Jack Crossfire |
Mar 06, 2014 @ 03:38 AM | 9,306 Views

Finally got a test image from the raspberry pi cam, after a day of reflashing it because it couldn't expand the filesystem to the full SD card size & waiting for it to upgrade thousands of python libraries just to enable camera support.
To this day, the raspberry pi cam is the only camera which can send uncompressed video directly to a 1Ghz single board computer. Still images come out at 2592x1944. The quality is quite sharp, all the way to the corners. It detects texture required for optical flow.
The problem is optimizing the macroblock size, search radius, & search granularity to detect a higher maximum velocity than the PX4flow can detect. It lies somewhere between the PX4flow's macroblock size & far below the full frame size.
What the raspberry pi cam lacks is the large light gathering ability which allowed the PX4flow to work at high shutter speeds. What happens when it's moving on an aircraft?

FUGGEDABOUTIT
...Continue Reading
Posted by Jack Crossfire |
Mar 05, 2014 @ 04:39 PM | 9,184 Views
There was a lot of risk in this, tearing down a perfectly good gimbal & making massive unproven changes.

The journey begins with 2 new IMU's, made entirely of recycled parts. Got rid of the MPU9150 & went with ancient ITG3200 + KXTF9's to provide only 6 axes. To eliminate the motor interference, 2 wire I2C was converted to 1 wire UART in microcontrollers near the sensors.

No more heavy insulation was required & the wires were reduced to 3 conductors.
...Continue Reading
Posted by Jack Crossfire |
Mar 03, 2014 @ 07:02 PM | 9,021 Views

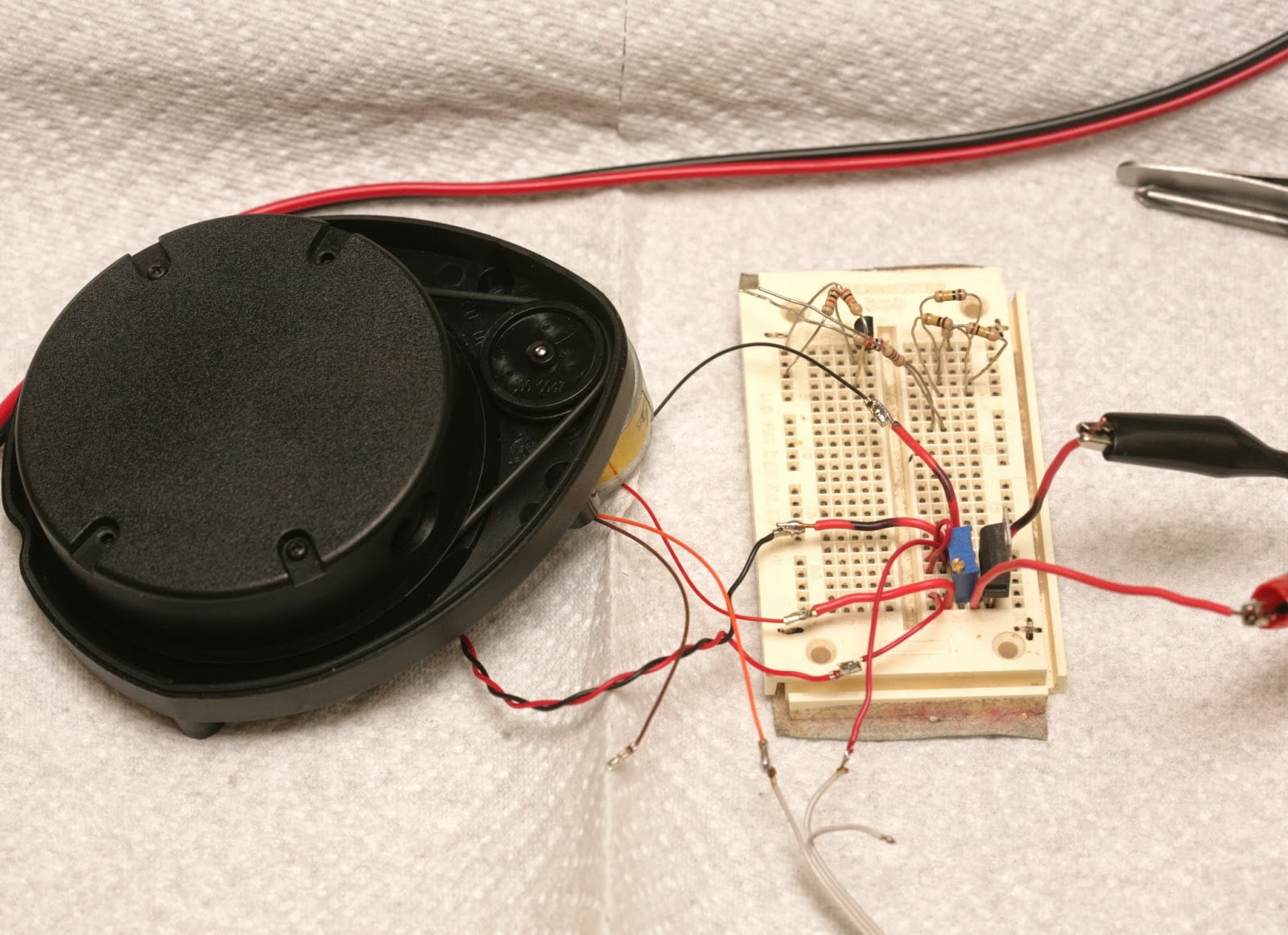
No-one ever tore 1 of these down, so it was time for someone to do it. It might be disappointing, but

that's all there was in this $40 model. The $200 models are probably the same. There might be some difference in the head travel distance & the quality of the motor.
...Continue Reading
- User Lists







