Archive for June, 2013
Posted by Jack Crossfire |
Jun 28, 2013 @ 05:46 AM | 6,873 Views
Extremely hot weather warranted another shot at frequency scaling.
After much troubleshooting, the answer was no. The Asus M4A79XTD did not support frequency scaling & overclocking. Linux was reporting a 3.2Ghz limit with frequency scaling enabled. It's disappointing that no-one ever wondered why overclocked frequency scaling wasn't supported.
The process ideally involves enabling quiet n' cool mode, then setting /sys/module/processor/parameters/ignore_ppc to 1, setting
/sys/devices/system/cpu/cpu*/cpufreq/scaling_max_freq to 3600000.
The ignore_ppc parameter only unlocked it up to 3.2Ghz, not the overclocked speed of 3.6Ghz.
After 3 hours of useless Goog searches, it turned out the BIOS reported 3.6Ghz regardless of frequency scaling being enabled & Linux reported 3.2Ghz. Compile times with Linux reporting 3.2Ghz & BIOS reporting 3.6Ghz were identical to 3.6Ghz. Compile times with the BIOS reporting 3.2Ghz were exactly 11% slower, so Linux was improperly reporting the speed.
Seem to recall very rare cases years ago when Linux reported a bogus speed & none of the Goog searches showed it, so it wasn't on the radar.
That also means scaling_min_freq of 800Mhz is really 900Mhz & they don't accept any lower values, regardless of ignore_ppc. It's much cooler, anyway. It should reduce the electric bill & improve productivity.
It's still too noisy to leave on all night. A quieter CPU fan for overclocking was always a dream, but never affordable compared to buying a faster CPU.
3 years after that legendary upgrade, there are octocores but 4Ghz is still the limit. Kiwipedia says 7Ghz is possible, but the power consumption with current techniques is too high to be practical. 4Gz is the practical limit of the old silicon chip.
After much troubleshooting, the answer was no. The Asus M4A79XTD did not support frequency scaling & overclocking. Linux was reporting a 3.2Ghz limit with frequency scaling enabled. It's disappointing that no-one ever wondered why overclocked frequency scaling wasn't supported.
The process ideally involves enabling quiet n' cool mode, then setting /sys/module/processor/parameters/ignore_ppc to 1, setting
/sys/devices/system/cpu/cpu*/cpufreq/scaling_max_freq to 3600000.
The ignore_ppc parameter only unlocked it up to 3.2Ghz, not the overclocked speed of 3.6Ghz.
After 3 hours of useless Goog searches, it turned out the BIOS reported 3.6Ghz regardless of frequency scaling being enabled & Linux reported 3.2Ghz. Compile times with Linux reporting 3.2Ghz & BIOS reporting 3.6Ghz were identical to 3.6Ghz. Compile times with the BIOS reporting 3.2Ghz were exactly 11% slower, so Linux was improperly reporting the speed.
Seem to recall very rare cases years ago when Linux reported a bogus speed & none of the Goog searches showed it, so it wasn't on the radar.
That also means scaling_min_freq of 800Mhz is really 900Mhz & they don't accept any lower values, regardless of ignore_ppc. It's much cooler, anyway. It should reduce the electric bill & improve productivity.
It's still too noisy to leave on all night. A quieter CPU fan for overclocking was always a dream, but never affordable compared to buying a faster CPU.
3 years after that legendary upgrade, there are octocores but 4Ghz is still the limit. Kiwipedia says 7Ghz is possible, but the power consumption with current techniques is too high to be practical. 4Gz is the practical limit of the old silicon chip.
Comments (0)
Add Comment
Posted by Jack Crossfire |
Jun 27, 2013 @ 11:09 PM | 6,915 Views
| Final pegasus launch (0 min 41 sec) |
Someone should have donated a brushless gimbal to NASA. That was the end of the Pegasus. It made launching 980 lbs cost $25 million + the $55 million in development costs, many years ago. Only 1 off science missions fell into that weight category.
The launch rate was down to 1 per year. The most economical rocket payload is 10,000lb. It needs to be big enough for a 15 year communications satellite + a few cubesats. Regardless of air launching, sea launching, or ground launching, that's what you need to hurl for the cost to be minimized.
The thought occurred of trying to observe it from Mission peak. The mane problem with observing a rocket launch from remote places is no status of the launch, no internet, no cell phone, even with a $1000/year plan.
exede.com has satellite internet for $60/month, which can be hacked for battery power. Ideally, you'd have a live video feed at the location, completely impractical under modern bandwidth caps.
The most economical solution is a home wifi network that goes 30 miles to Mission peak or 300 miles to Vandenberg. You could probably reach Mission peak with highly directional 900Mhz antennas at 1W. It would be a PPP network at maybe 115200, good enough for reloading spaceflightnow.com & not requiring a license.
With the Pegasus gone, the only west coast launches are from Vandenberg, a bit farther than 900Mhz XBee radios can reach. The FCC rules are complicated, but seem to limit that range to low duty cycle voice & unencrypted, commercial free data.
Maybe the home computer could send the live audio commentary of the launch over ham radio, with some kind of minimal internet functionality to control it. Ham radio bands are extremely crowded. It takes a lot of frequency changing & tuning to work.
There's also receiving the NASA TV feed directly, with a big old satellite dish & TV on the mountain.
Posted by Jack Crossfire |
Jun 27, 2013 @ 04:31 PM | 7,808 Views

The turbopump is made by Barber-Nichols, not SpaceX. Barber-Nichols acquired the tooling in 1996 with NASA funding. They made 2 turbopumps for NASA before building the Merlin turbopumps. The NASA engines made 60,000lb thrust. The Merlin turbopump has undergone several enhancements.
The Merlin 1A spun at 20,000rpm & the engine made 77,000lb thrust. The 1B spun at 22,000 rpm & the engine made 85,000lb thrust. The 1C made 94,000lb thrust. The 1D made 147,000lb thrust. Changes in the turbopump to achieve those massive improvements were not released.
They could have used the same tooling up to 94,000lb thrust, then received a massive investment to make 147,000lb thrust possible.
Despite successful testing as individual engines, the 1st tests of all 9 engines of the Falcon 9 together in June met problems with numerous temperature sensors getting too hot. There is thermal amplification from running that many engines next to each other on a test stand, in addition to accoustic stress. Modeling thermal effects remanes a great challenge.
An amazing amount of designing goes into managing standing waves & vibration in rocket engine plumbing. The fluid lines act like musical instruments. The contained explosion creates not a constant force but an oscillating force in the plumbing, which interacts with the pressures induced by the turbopumps & creates standing waves. Not simulating the acoustic effects can cause cavitation & breakage.
Lengths of pipe have to be adjusted based on acoustic wavelength. Pipe has to be bent based on sound propagation & corrugated when flexing is required. Every change must be simulated to test for acoustic effects.

Rocket engine turbopumps are amazingly hard to manufacture. Unfortunately, they still can't be 3D printed. The space shuttle impellers needed 12 hours of machining to achieve the required precision. It would be surprising if the Merlin 1D turbopumps were actually made in Colorado.
Posted by Jack Crossfire |
Jun 27, 2013 @ 05:16 AM | 6,480 Views
Sadly, the home made preamp presented a defect since conversion to stereo that would prevent it from actually recording 2 channels. Over time, 1 of the channels often slowly fades out. Sometimes, it does nothing.
This didn't happen when both channels were directly connected to the XLR's. It only happened when a new switch was added to 1 of the channels to switch between a single XLR & dual XLR's. The fading happens to the 1 channel in both modes.
Toggling the switch temporarily makes the problem go away, before the channel fades out again after several minutes. It's not likely the pot. The switch is switching a very high impedance microphone input, making it very sensitive to contamination. It may not be practical. There is already another switch which switches between XLR's & RCA's, creating 2 points of contamination in the 1 channel.
Leading theory is a defective switch, which requires permanently soldering 1 mode in to test. If the problem can't be fixed in 2 months, there won't be a recording of the Delta IV heavy. It didn't have this problem when the switch first arrived.
The commercial ones all require 60Hz AC, probably because they benefit from isolation transformers.

Posted by Jack Crossfire |
Jun 25, 2013 @ 06:20 PM | 7,018 Views
It turns out a lot of middle aged men ride skateboards. There are long distance skateboarders. There are pushers & pumpers. Pumpers use a specially tuned board which translates rocking motion to forward thrust. They can go 25mph by just rocking, but it's not effective going uphill.
Pushers push with 1 foot. The longest 24 hour skateboard distance is 260 miles. 100 miles is considered difficult on a bike. There is no data on the equivalent exertion of skateboarding & running. It could probably reach the bay, but there is no pedestrian route across the bay.
Long distance skateboarding men don't appear as healthy as runners. No skateboard has ever been paired with a runner. There are no skateboarding women of note. It's a mystery why the hyperinflation generation adopted biking for their alternative commutes when skateboards are much more convenient.
A helmet is required above a certain speed, probably 2x running speed.
The thought occurred that attainable women could use a skateboard to go on running trips with lions. This is the mane problem, since they can't travel nearly as far on foot as single men or unattainable women. It's just a matter of getting them to believe they can ride a skateboard for many miles.
The other use would be longer timelapse videos & reducing the miles run, which have been driven above the ideal limit by the need to get around. There's also riding to a new location & running there, transporting flight gear to...Continue Reading
Pushers push with 1 foot. The longest 24 hour skateboard distance is 260 miles. 100 miles is considered difficult on a bike. There is no data on the equivalent exertion of skateboarding & running. It could probably reach the bay, but there is no pedestrian route across the bay.
Long distance skateboarding men don't appear as healthy as runners. No skateboard has ever been paired with a runner. There are no skateboarding women of note. It's a mystery why the hyperinflation generation adopted biking for their alternative commutes when skateboards are much more convenient.
A helmet is required above a certain speed, probably 2x running speed.
The thought occurred that attainable women could use a skateboard to go on running trips with lions. This is the mane problem, since they can't travel nearly as far on foot as single men or unattainable women. It's just a matter of getting them to believe they can ride a skateboard for many miles.
The other use would be longer timelapse videos & reducing the miles run, which have been driven above the ideal limit by the need to get around. There's also riding to a new location & running there, transporting flight gear to...Continue Reading
Posted by Jack Crossfire |
Jun 25, 2013 @ 05:03 AM | 7,064 Views
Fox news wrote:
It's hard to find any fault in the system. Technology jobs were always a cut above average in terms of income & the reason was because it was damn...Continue Reading
Acting with Sen. Orrin Hatch, R-Utah, "forward.us" successfully amended the current immigration bill to almost triple the number of foreign high-tech workers allowed into the U.S. from 65,000 to 180,000. The Hatch proposal also eliminated the requirement employers prove their new green card-holder did not displace an American worker.If you've been in the real world & not watching the stock market, you know it's very hard to make money. There hasn't been any hiring, as businesses wait for the results of the latest immigration bill. Salaries are a lot less & long term positions with benefits went away years ago for anyone but the extremely over qualified. Case in point: a PhD is required to write a bootloader at Broadcom.
it was the tech sector, which wants the right to hire the best and brightest even if they're not American, that helped jump-start the immigration debate months ago.Just like women in their 30's, if they can't have the best, they won't take anyone. It's easier to get into Harvard than Google. So now a lot of smart people who could probably do the job, but maybe for 1% more than the absolute lowest cost & maybe 1% slower than the absolute very fastest watch from the sidelines as the labor market holds out for the very best in Mumbai & Taiwan.
It's hard to find any fault in the system. Technology jobs were always a cut above average in terms of income & the reason was because it was damn...Continue Reading
Posted by Jack Crossfire |
Jun 24, 2013 @ 06:49 PM | 7,064 Views

Reverted to position -> target v -> target tilt for the 1st time since 2008. It may be the way arducopter does it, but it didn't work as well as position -> target tilt for the Blade MCX.
The optimum algorithm may depend on the quality of velocity data. An accelerometer may improve long term velocity data, but not on something this small.
The amount of battery charge determines the light pattern. That was a flat battery. This is a full battery:

The mane problem with the ground based camera pair is believed to be errors in determining the direction of motion.
Posted by Jack Crossfire |
Jun 23, 2013 @ 07:48 PM | 6,753 Views
The 10 year quest for compact, simple range extension of foot transportation has led to the el cheapo skateboard. Inventing new forms of kid transportation has been an industry forever, but it's time for adults to think about the logic of spending $10 to move a 2 ton piece of metal to go 30 miles.
Walmart has a $35 one with 58mm eurethane wheels. It's very quiet on asphalt. It's $40 locally. Target finally had a sale, temporarily reducing the local one to $35.
They're rated for 110lbs, but much heavier kids skate past you on those Kryptonics Torpedos. All the parts except for the board can be had for $30.
The kid reviews for the Kryptonics Torpedo are absolutely awful. They're putting in another $60 in parts to get those to work. A mechanism which converts banking to turning, with just the right amount of tension, just the right balance, durable bearings, just the right amount of cushioning in the wheels, is still very expensive to manufacture.
The absolute cheapest is under $20 with microscopic wheels. There are questions of endurance of the parts, noise, wheel size, maximum speed. No-one has ever designed a skateboard for practical transportation. The mane market has only been stunts. The whole matter could involve a lot of experimentation, leading to over $100 wasted.
There is also a 3 wheeler using just 1 skateboard truck for turning & a scooter wheel for speed. It would wear out fewer parts & be lighter.
For the amount invested in...Continue Reading
Walmart has a $35 one with 58mm eurethane wheels. It's very quiet on asphalt. It's $40 locally. Target finally had a sale, temporarily reducing the local one to $35.
They're rated for 110lbs, but much heavier kids skate past you on those Kryptonics Torpedos. All the parts except for the board can be had for $30.
The kid reviews for the Kryptonics Torpedo are absolutely awful. They're putting in another $60 in parts to get those to work. A mechanism which converts banking to turning, with just the right amount of tension, just the right balance, durable bearings, just the right amount of cushioning in the wheels, is still very expensive to manufacture.
The absolute cheapest is under $20 with microscopic wheels. There are questions of endurance of the parts, noise, wheel size, maximum speed. No-one has ever designed a skateboard for practical transportation. The mane market has only been stunts. The whole matter could involve a lot of experimentation, leading to over $100 wasted.
There is also a 3 wheeler using just 1 skateboard truck for turning & a scooter wheel for speed. It would wear out fewer parts & be lighter.
For the amount invested in...Continue Reading
Posted by Jack Crossfire |
Jun 22, 2013 @ 12:47 AM | 7,023 Views
The answer is yes. NASA is still around, with a budget reduced to 2007 levels, or 1776 levels after inflation. They're still trying to build a rocket more powerful than the Saturn V while constrained to the same infrastructure as the Saturn V, which requires making it a lot more efficient.
They spent the 1990's trying to perfect carbon fiber fuel tanks, only to go back to aluminum. Now, the buzzword is friction stir welded aluminum.
After spending 10 years testing small scale friction stir welding tools for hardware that will never fly, they are only now starting to build the full size tools for the actual rocket. Making the end caps of a giant rocket fuel tank is very hard. Hobbyists spend most of their focus on just perfecting a fuel tank which can take the highest pressure with the least mass. You need a dome welding tool the size of the actual dome.

Then you need a machine the size of the entire fuel tank to weld the end caps & barrel together.

After building all the tools, you hopefully haven't lost interest & still build the rocket. That was a lot of work, just to have lighter welds.
There's a nifty video of a J2-X gimbal test, the 1st time a full rocket flame with its shock cone was pointed around the test stand since the 1970's. The gas generator exhaust pipe snaking its way around the nozzle is a definite return of a Saturn V trademark to modern times.
It would be neat if someone drew a modern space mission diagram in the style of the 1960's drawings that depicted the Apollo missions, with the same fonts, but with modern vehicles.



Maybe there could be a simulated TV broadcast of a modern mission with the 1960's style graphics.

There just aren't any modern missions as ambitious.
They spent the 1990's trying to perfect carbon fiber fuel tanks, only to go back to aluminum. Now, the buzzword is friction stir welded aluminum.
After spending 10 years testing small scale friction stir welding tools for hardware that will never fly, they are only now starting to build the full size tools for the actual rocket. Making the end caps of a giant rocket fuel tank is very hard. Hobbyists spend most of their focus on just perfecting a fuel tank which can take the highest pressure with the least mass. You need a dome welding tool the size of the actual dome.

Then you need a machine the size of the entire fuel tank to weld the end caps & barrel together.

After building all the tools, you hopefully haven't lost interest & still build the rocket. That was a lot of work, just to have lighter welds.
| J-2X Gimbal Testing at Stennis Space Center (1 min 26 sec) |
There's a nifty video of a J2-X gimbal test, the 1st time a full rocket flame with its shock cone was pointed around the test stand since the 1970's. The gas generator exhaust pipe snaking its way around the nozzle is a definite return of a Saturn V trademark to modern times.
It would be neat if someone drew a modern space mission diagram in the style of the 1960's drawings that depicted the Apollo missions, with the same fonts, but with modern vehicles.



Maybe there could be a simulated TV broadcast of a modern mission with the 1960's style graphics.

There just aren't any modern missions as ambitious.
Posted by Jack Crossfire |
Jun 20, 2013 @ 04:55 PM | 7,990 Views

A bag of bits arrived on the bench.
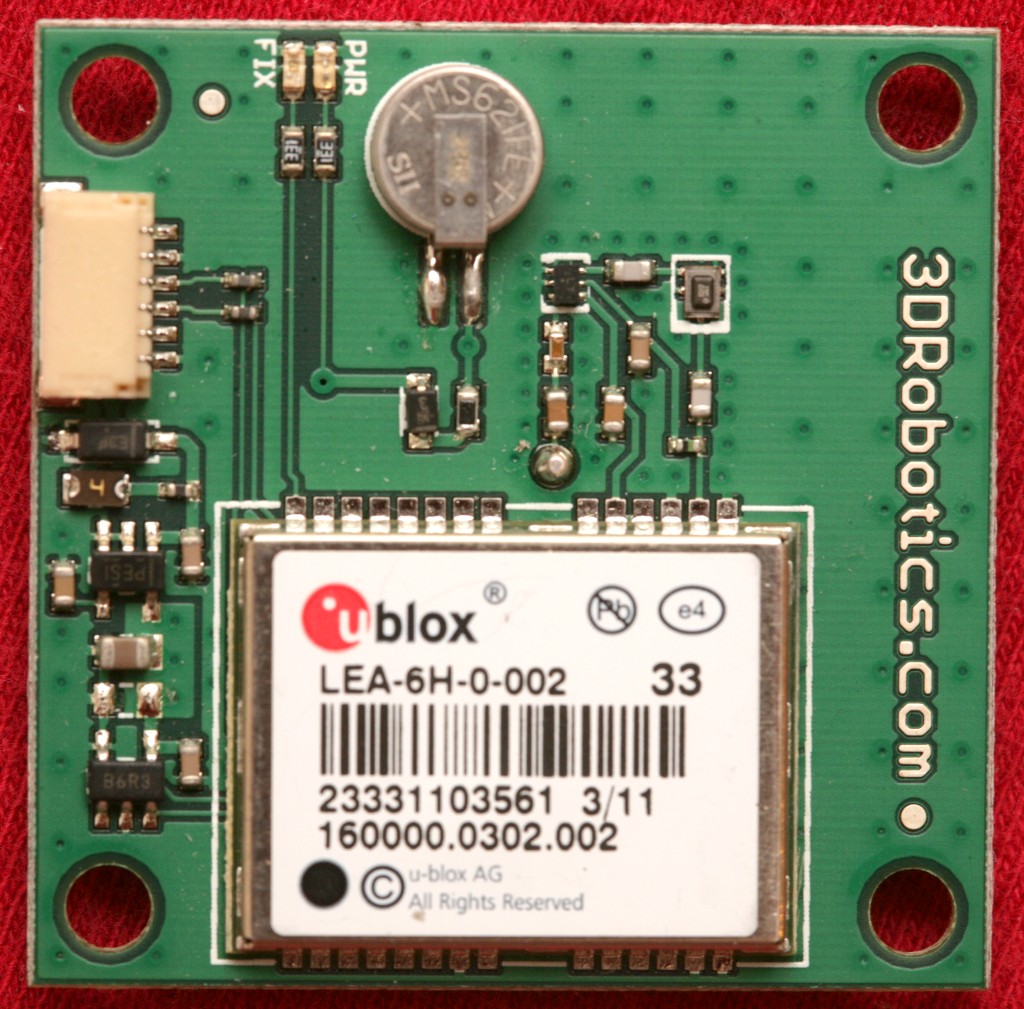
The GPS module is an old school ublox-6 with no compass. It does have an outboard amplifier for the antenna. Seems to be accepted that all future GPS modules will have integrated compasses, since they're both going to be far away from electrical noise.
...Continue Reading
Posted by Jack Crossfire |
Jun 20, 2013 @ 12:36 AM | 7,543 Views
| Berkeley Run with brushless gimbal (5 min 49 sec) |
The 1st 11 miles of running with the handheld gimbal happened. Depending on how the cables were positioned, they either caused massive problems or it worked flawlessly. The cables definitely caused wobbling & there were a few magic alignments which made it oscillate.
It took 2 hours to run 11 miles, zapping the battery entirely & probably destroying it. Heading drift was significant in either direction, after 5 minutes. There's no easy way to use a magnetic heading, unless the motors constantly spin.
In some segments, the gimbal was more stable than software could get it. The 1st 5 miles were 9 minute miles. The last 5 miles were a lot slower because of record chafing.
Posted by Jack Crossfire |
Jun 19, 2013 @ 08:45 PM | 7,724 Views

So Bre Pettis finally sold Makerbot Industries for 1/2 billion dollars. It definitely puts your monthly ABS budget & the concerns of whether to splurge on the 2 color extruder in perspective when you realize the founder walked away with at least 1/4 billion dollars.
Don't remember as much wealth being concentrated among so few people before 1999. Then this phenomenon of massive IPOs appeared, based purely on speculation with no revenue. Now, it's massive acquisitions based purely on speculation, using pure debt. Stratasys only made $20 million in 2011. Makerbot starved their market, causing them to start losing money. Nowadays, any amount of money can be borrowed with no collateral, so Stratasys can borrow 1/2 billion.
Once again, it's not the revenue from Makerbot sales or speculation on the value of being able to print goods, but the enormous library of widgets users of the Makerbot submitted to thingiverse.com for free, over 100,000 in total, & which Bre was able to monetize with the acquisition. Like the instagram & tumblr acquisitions, a massive amount of data was created for free while the true value of it was monetized by just a few individuals. Is that the way open source hardware is supposed to work?
The answer we're supposed to give is yes, the world should be based on legions of people producing data for free & the true value of that data being concentrated into 1 top individual in these massive buyouts. The...Continue Reading
Posted by Jack Crossfire |
Jun 18, 2013 @ 11:29 PM | 7,085 Views
Outdoor flying got old because the weather was always bad, the positioning was limited to the 1 meter 4Hz of GPS, & it was too expensive. 3 years later, where does outdoor positioning stand? Improvements in GPS have remaned limited to the glacial speed of a government space program, but there have been some improvements.
On the extreme high end receivers, GPS has improved greatly. Trimble got back into the game, after not upgrading its GPS products in years. The gold standard is now the BD960. Unreasonable rocket said that was giving 15cm accuracy when combined with a subscription to Omnistar.
Russia finished the Glonass system while US continued to slowly upgrade some its satellites. The newest satellites have 2 frequencies & more power. The best receivers have the highest sensitivity, support dual frequences, & combine Glonass with GPS for double the satellite coverage.
3 years ago, it was a good day if 10 satellites were in view. Nowadays, 20 satellites would normally be in view for a high end receiver.
GPS satellites have to be replaced every 15 years. Glonass satellites have to be replaced every 10 years. A bad economy can compromise either system.
In the consumer space, the gold standard is now uBlox-7. That does GPS/GNSS fusion at 10Hz, but only single frequency. There's definitely a lag between new technology & community adoption, with uBlox-6 still considered the gold standard among RC pilots.
The RC community seems to depend more on word of mouth & reseller promotion, meaning a new gadget won't ever get used until it gets promoted by an RC store. When uBlox-7 finally becomes popular, it's going to be a new world of outdoor multirotors. It's not clear if uBlox-7 improves the altitude measurement enough to discard the barometer.
Satellite positioning still won't compete with machine vision. Even at 20cm accuracy, it's not good enough for camera positioning. Progress there is still going to be tied into government R&D spending, government's ability to buy satellites, the rate at which government can afford to upgrade.
On the extreme high end receivers, GPS has improved greatly. Trimble got back into the game, after not upgrading its GPS products in years. The gold standard is now the BD960. Unreasonable rocket said that was giving 15cm accuracy when combined with a subscription to Omnistar.
Russia finished the Glonass system while US continued to slowly upgrade some its satellites. The newest satellites have 2 frequencies & more power. The best receivers have the highest sensitivity, support dual frequences, & combine Glonass with GPS for double the satellite coverage.
3 years ago, it was a good day if 10 satellites were in view. Nowadays, 20 satellites would normally be in view for a high end receiver.
GPS satellites have to be replaced every 15 years. Glonass satellites have to be replaced every 10 years. A bad economy can compromise either system.
In the consumer space, the gold standard is now uBlox-7. That does GPS/GNSS fusion at 10Hz, but only single frequency. There's definitely a lag between new technology & community adoption, with uBlox-6 still considered the gold standard among RC pilots.
The RC community seems to depend more on word of mouth & reseller promotion, meaning a new gadget won't ever get used until it gets promoted by an RC store. When uBlox-7 finally becomes popular, it's going to be a new world of outdoor multirotors. It's not clear if uBlox-7 improves the altitude measurement enough to discard the barometer.
Satellite positioning still won't compete with machine vision. Even at 20cm accuracy, it's not good enough for camera positioning. Progress there is still going to be tied into government R&D spending, government's ability to buy satellites, the rate at which government can afford to upgrade.
Posted by Jack Crossfire |
Jun 18, 2013 @ 07:38 PM | 7,869 Views


Posted by Jack Crossfire |
Jun 16, 2013 @ 11:51 PM | 7,662 Views

It was a lot darker in there than expected. The apartment actually has more lighting.

...Continue Reading
Posted by Jack Crossfire |
Jun 15, 2013 @ 10:40 PM | 6,721 Views
can be summed up as very basic mundane services making money to fund brief trips to space that haven't made money. It takes tremendous focus to dream of space travel, yet focus every hour of every day on the mundane businesses of home networking & financial services so you can one day have a brief adventure in space. Every space tourist had to be very successful in financial services, home networking, basic computer science, so they could afford to fly in space.
In order for Elon Musk to play with rockets, he had to spend many years perfecting Paypal, focus on the mundane task of setting up merchant accounts, wire transfer money using the internet, figure out the concept of withholding payment below a minimum balance.
Most people are very good at not doing their hobby for a living. They have a "work hard play hard" mentality, focusing intensely on something very mundane in the faith that it's someday going to fund a better hobby. They have been the most successful.
Some people are not good at compartmentalizing. They have a "play hard play hard" mentality & have been the least successful. They grow manes & write blog posts all day.
In order for Elon Musk to play with rockets, he had to spend many years perfecting Paypal, focus on the mundane task of setting up merchant accounts, wire transfer money using the internet, figure out the concept of withholding payment below a minimum balance.
Most people are very good at not doing their hobby for a living. They have a "work hard play hard" mentality, focusing intensely on something very mundane in the faith that it's someday going to fund a better hobby. They have been the most successful.
Some people are not good at compartmentalizing. They have a "play hard play hard" mentality & have been the least successful. They grow manes & write blog posts all day.
Posted by Jack Crossfire |
Jun 15, 2013 @ 03:45 AM | 7,853 Views
| Old school brushless gimbal (1 min 24 sec) |

After all that 3 axis development, an old school 2 axis brushless gimbal is tested. The cogging from the DT700 is less distracting when it's used for roll. These motors have the right amount of torque for roll.
Posted by Jack Crossfire |
Jun 12, 2013 @ 11:27 PM | 6,948 Views
Not sure what's driving the current wooden propeller craze. Whenever there's no obvious reason, it doesn't last, like the A123 battery craze.
Wooden propellers shatter on impact, while plastic bends but remanes intact. Wood is heavier, more expensive than plastic. The extra weight could add gyroscopic stabilization in a quad & make them easier to balance.
Getting counter propellers for quads remanes about as ball busting as it was 6 years ago. There just aren't as many flying as fixed wings. Counter 12x6 is still nonexistent.
Wooden propellers shatter on impact, while plastic bends but remanes intact. Wood is heavier, more expensive than plastic. The extra weight could add gyroscopic stabilization in a quad & make them easier to balance.
Getting counter propellers for quads remanes about as ball busting as it was 6 years ago. There just aren't as many flying as fixed wings. Counter 12x6 is still nonexistent.

Posted by Jack Crossfire |
Jun 11, 2013 @ 09:32 PM | 7,108 Views
| ANKI DRIVE first look WWDC 2013 (2 min 34 sec) |
Another startup unveils a killer app for UAVs based on the concept of the intelligent toy.
"We are trying to combine the best of physical toys, the fact that they're tangible, with all the best things with video games — that they adapt to you, evolve, get better over time and stay fun"
The product remanes extremely secret, but seems to be a swarm of autonomous line following cars with the intelligence on an iOS phone broadcasting commands to bare bones electronics. They raised $50 million on just that. Imagine if they demoed autonomous flying toys like I developed for 7 years.
They put a release date at Nov with a set of intelligent cars costing $200. If the concept takes off, you won't have a snowball's chance in hell of getting into the intelligent toy business, after that. Of course, if they flop, you won't need to worry about missing out either.
The big leagues continue to be an ivy league boys club. You could not raise that kind of money for a toy startup without a PhD from Carnegie Mellon behind your name & you can't start a business on a hugely rare $100,000 kickstarter windfall.
If the same thing was translated to flying toys, it would use the optical flow floor pattern. Multiple copters would fly around a ground track with some ground based aid to the video processing. Maybe some vertical obstacles could be placed for the machines to learn their way around, with IR obstacle avoidance.
A 3D copter racing game would add a new dimension to the $50 million Anki car game, but no-one ever invested in a product with a BS in partying from the middle of nowhere mountain university behind it.
As Goog bought a bunch of UAV startups, a toy startup made it to an Apple speech, another business becomes more legitimate & the requirements change. Guys who learned about robots in their garages are replaced by guys with years of formal grad school research. Suddenly, flying model airplanes requires a PhD.
Posted by Jack Crossfire |
Jun 10, 2013 @ 11:55 PM | 7,714 Views
There was much hyping of a 30m/s or 67mph flight mode in Arducopter at the AVC, but so far there have been no videos of this mode controlled by autopilot. 4 months ago, there was 1 blurry video of manual high speed flight of a quad.
An autonomous 67mph flight of a quad would take quite a change from the standard helicopter hover code. It would need a transition from the vertical mode to the horizontal mode with only a slight tilt for lift. This is the hardest part for tilt rotors. They usually have a gradient where the feedback from the hovering mode is blended with the feedback from the horizontal mode which is running simultaneously.
The well known hovering mode is:
forward speed -> forward/back balance
turn -> clockwise/counterclockwise balance
altitude ->throttle
sideways slip -> left/right balance
The horizontal mode would be:
forward speed -> throttle
turn -> left/right balance
altitude -> forward/back balance
sideways slip -> clockwise/counterclockwise balance
Basically, it locks the forward speed to a constant value. There's also a new requirement for coordinated turns by synchronizing sideways slip & asymmetric thrust.
The problem is it takes a very large area & a high altitude or a parachute to test horizontal mode. It's not something a private individual can afford. The testing would begin with a human putting it into horizontal mode & then engaging autopilot. The horizontal mode is required if a quad is to replace a fixed wing.
| ArduCopter V2.9 - Stabilize at high speed (0 min 57 sec) |
An autonomous 67mph flight of a quad would take quite a change from the standard helicopter hover code. It would need a transition from the vertical mode to the horizontal mode with only a slight tilt for lift. This is the hardest part for tilt rotors. They usually have a gradient where the feedback from the hovering mode is blended with the feedback from the horizontal mode which is running simultaneously.
The well known hovering mode is:
forward speed -> forward/back balance
turn -> clockwise/counterclockwise balance
altitude ->throttle
sideways slip -> left/right balance
The horizontal mode would be:
forward speed -> throttle
turn -> left/right balance
altitude -> forward/back balance
sideways slip -> clockwise/counterclockwise balance
Basically, it locks the forward speed to a constant value. There's also a new requirement for coordinated turns by synchronizing sideways slip & asymmetric thrust.
The problem is it takes a very large area & a high altitude or a parachute to test horizontal mode. It's not something a private individual can afford. The testing would begin with a human putting it into horizontal mode & then engaging autopilot. The horizontal mode is required if a quad is to replace a fixed wing.
- User Lists







