What factors determine the best operating voltage for a motor?
BLOG 013
One of the few really-useful bits of information that we find in vendors' motor specs is the recommended voltage. [ usually stated as, for example, ......2-3S..........3S......4-6S...]
We are dependent on the vendor for this information, since there are no other clues to the best voltage, which might be anywhere between 3v and 60+ v.
When choosing a motor for a particular application, it is essential that we know the best voltage for each motor on offer. A battery voltage lower than the motor's best voltage will always produce a lower power output. A higher battery voltage will result in motor overheat or some related complication.
************************************************** ************
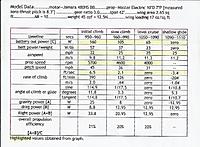
To understand the effects of supply voltage, let us imagine a series of test runs with a motor, at supply voltages of say, 3.5, 7.0, 10.5, 14.0, 17.5, 21.0v, and so on.
At each voltage, fit a prop which slows the motor to 75% of its no-load speed [at each voltage the no-load speed and the prop size will be different]
Each run to be continuous, with wide-open throttle; say 5 minutes duration.
Cooling arrangements: exposed motor, tractor prop, 20C ambient.
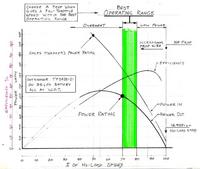
On each run, the motor temperature, starting at ambient, will increase as the seconds go by, and after two or three minutes it will stabilise at a steady value.
With each step-up in voltage, there will be an increase in the
...Continue Reading





























 About peterangus
About peterangus
